基础理论
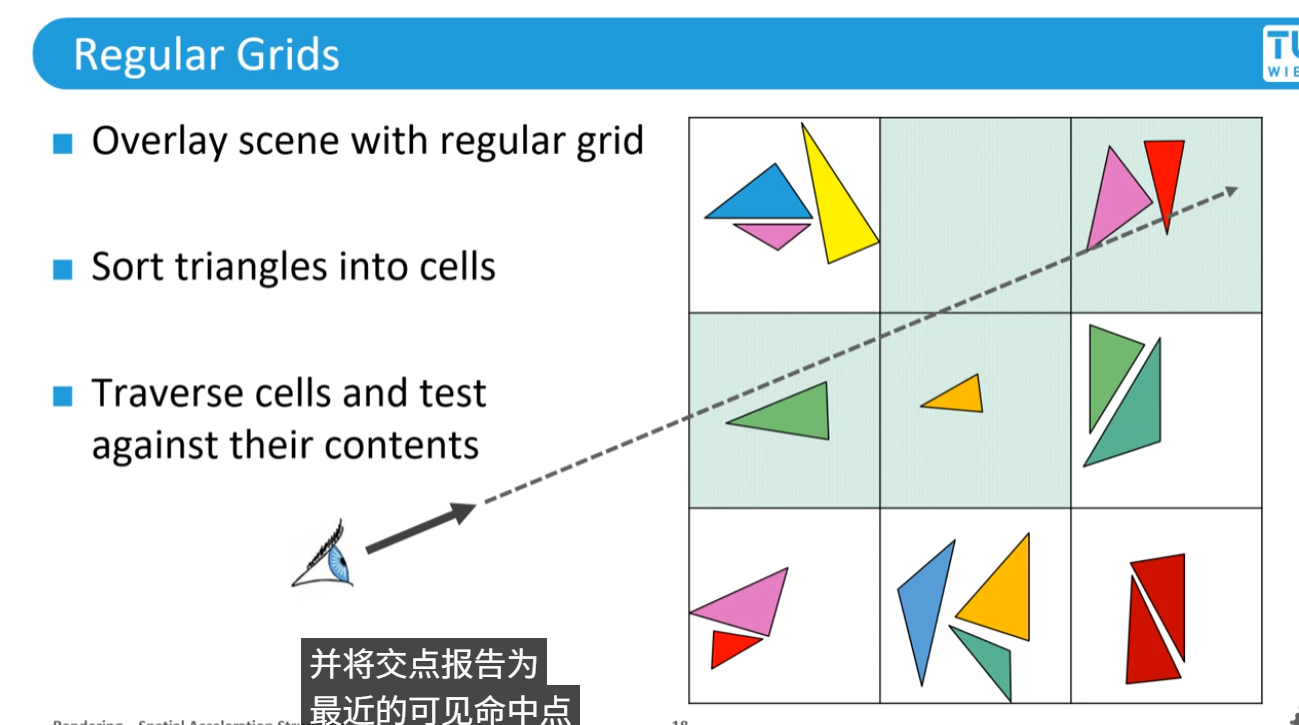
均匀网格划分
把整个场景 AABB 均匀划分成 Nx × Ny × Nz 的三维网格,每个 cell 里存放与其相交的 primitive(如三角形)列表
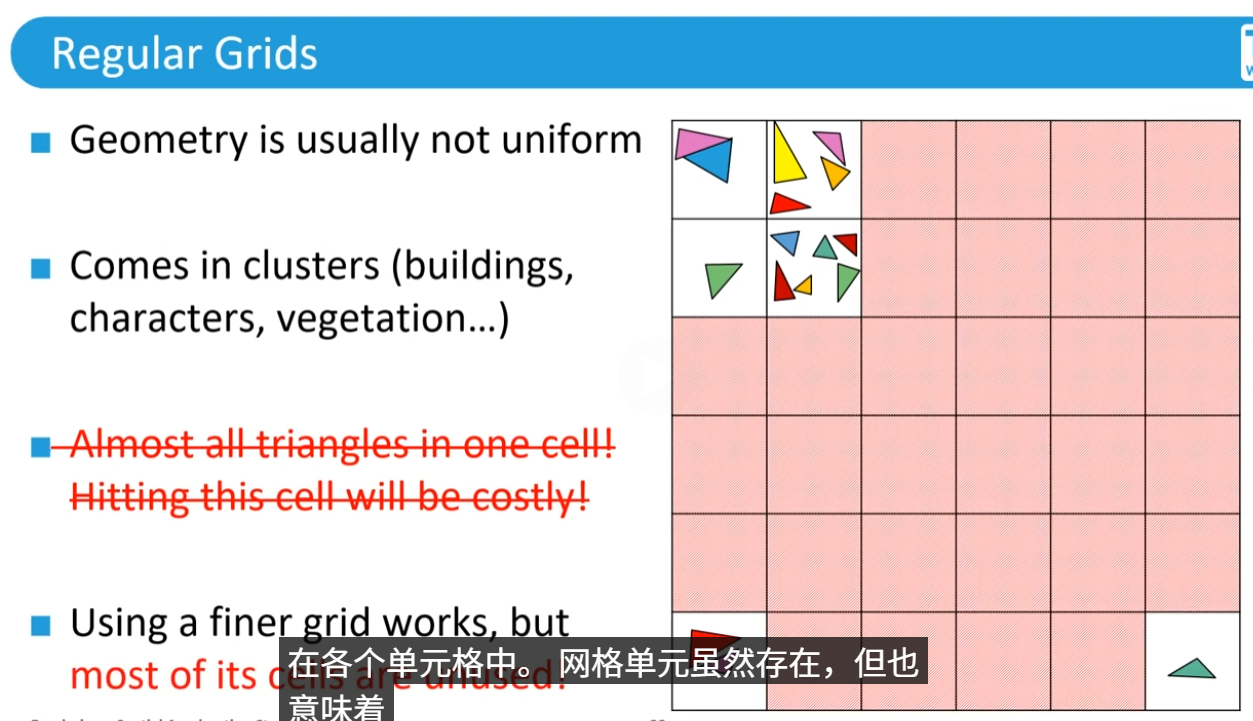
但是实际场景中Mesh很容易是按簇分布的,此时如果击中左上角这个cell,会导致大量的相交计算
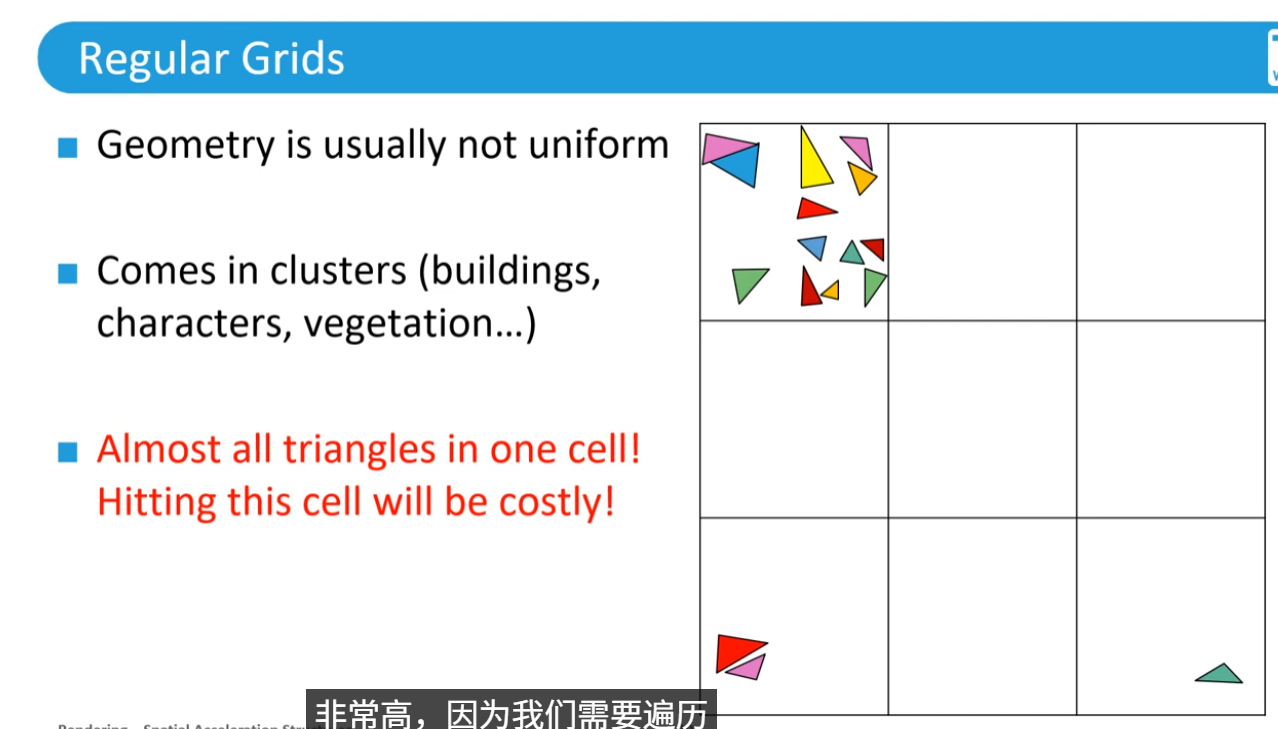
最容易的解决办法是提高grid的分辨率
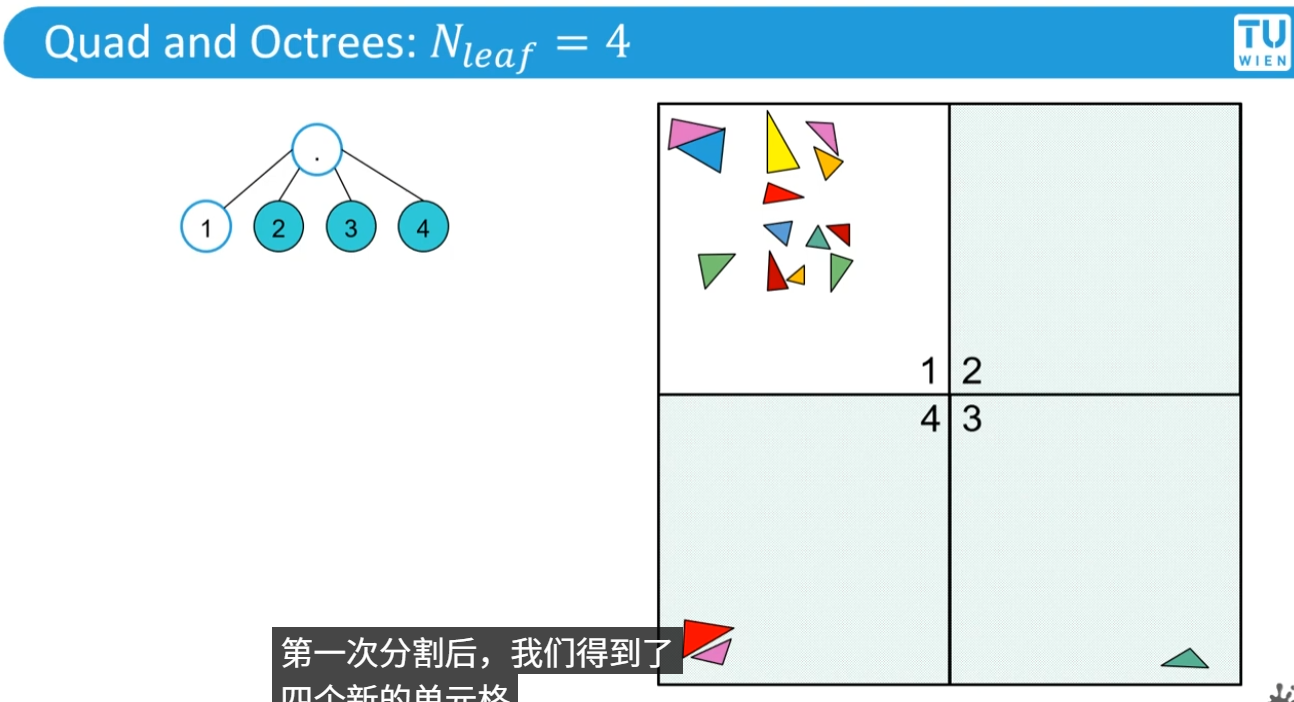
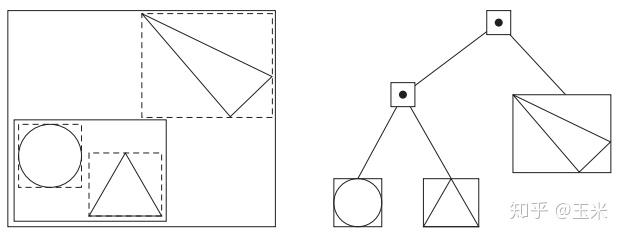
四叉树/八叉树
这种方法是从顶向下划分,Root表示整个场景,先切4刀,检查每个区域是否Mesh数量小于阈值了,如果不小于,继续划分
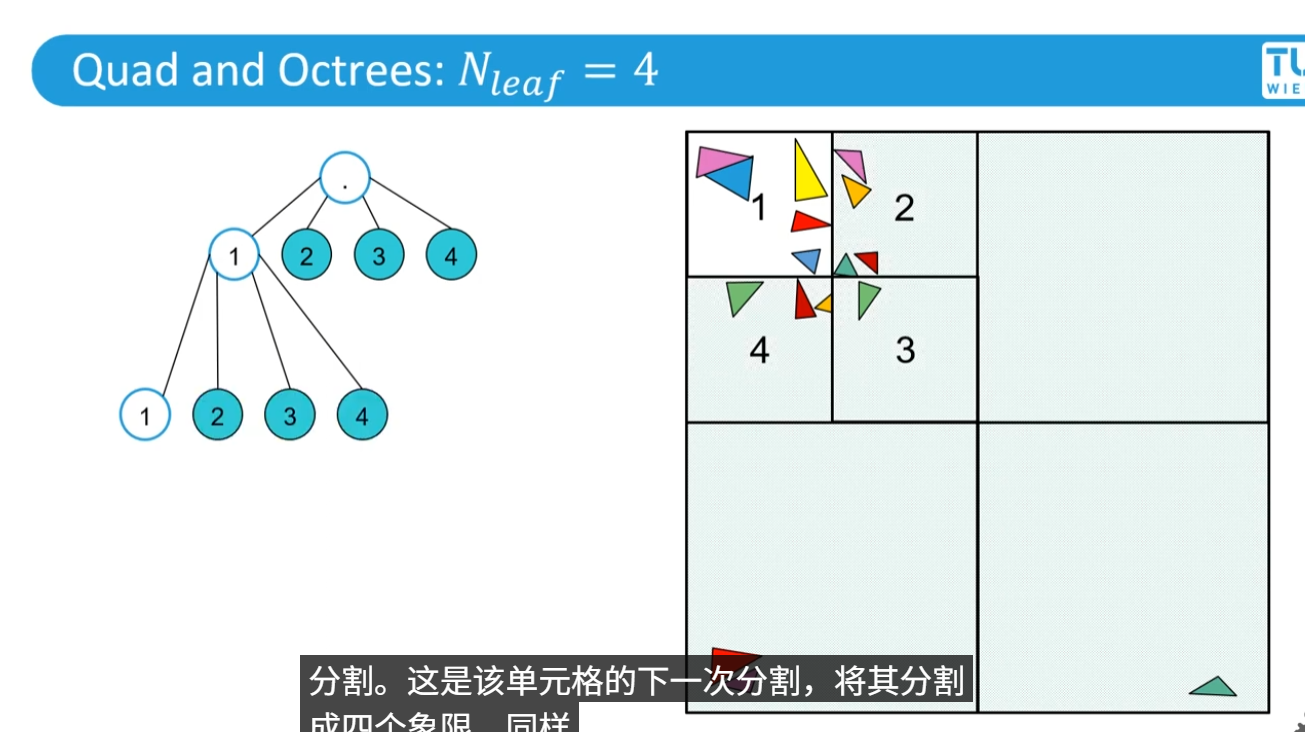
如下图中区域1就需要继续划分,而234就不需要了
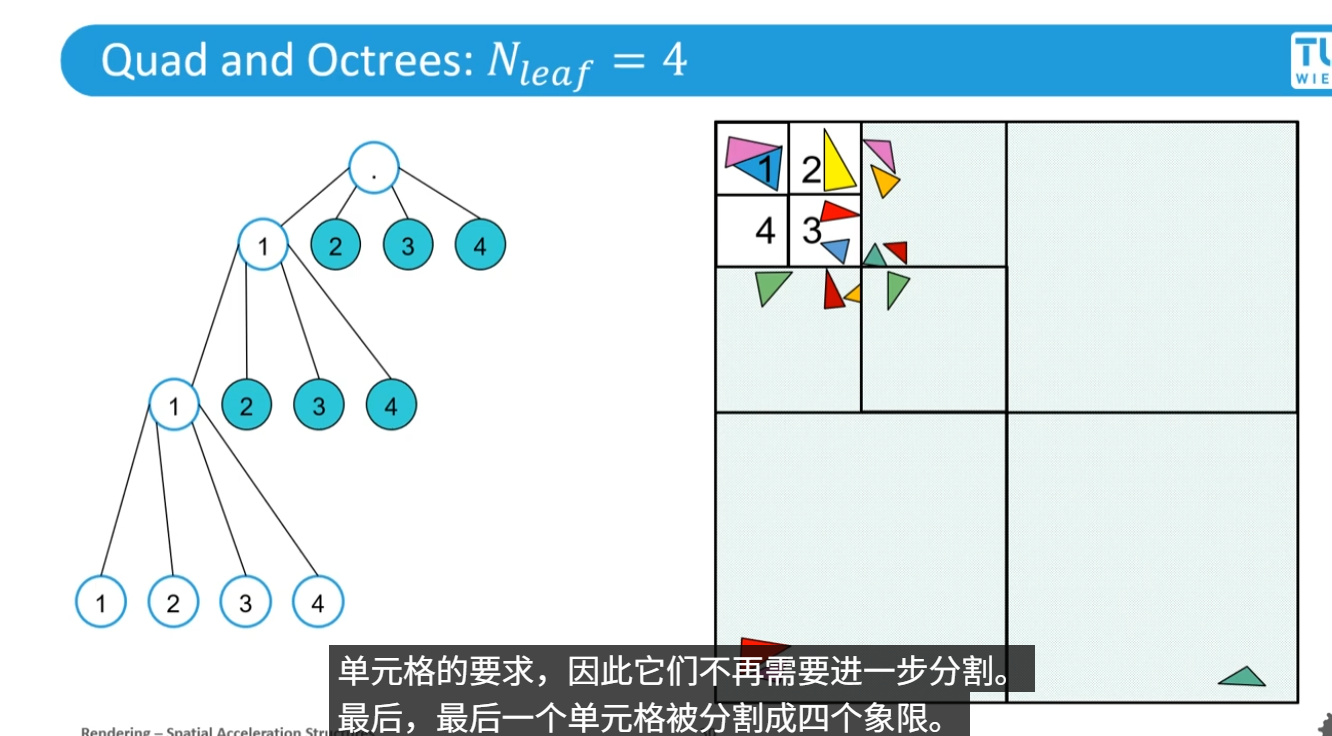
区域1中Mesh还是很多,继续划分
继续划分新的区域1
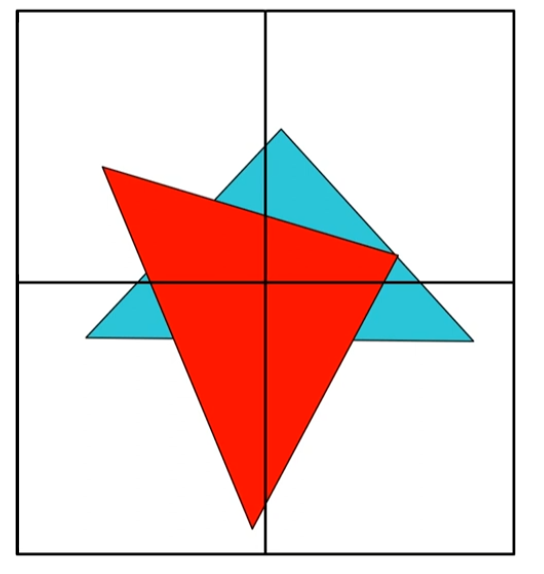
上述流程假定一个情况:每个三角形都能刚好划分到不同的区域,但实际上一个三角形可能分布在不同的区域内,所以每个涉及的区域都需要存储这个三角形,如下图
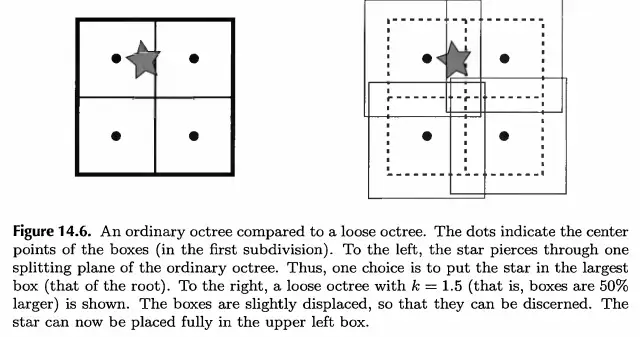
松散八叉树
扩大子节点的范围,这样可以保证这个结点是完全包含五角星
假设一条射线从上到下进行击中判断,正好落在左上角和右上角两个结点的中心偏右一点,那左图(如果只在左边存储五角星)只有右边结点会加入检测队列,导致五角星漏掉了,那五角星就会被误判,右边就能正常把左边结点加入判断流程
线性八叉树
TODO:具体使用流程还不太清除
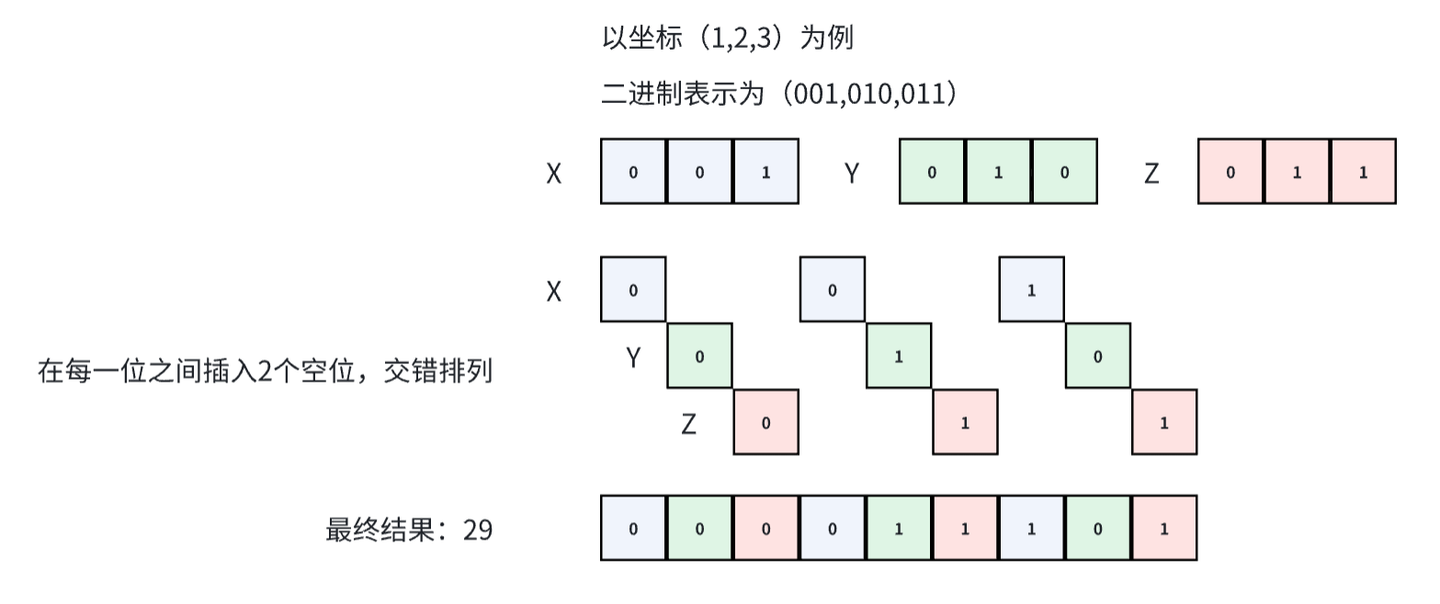
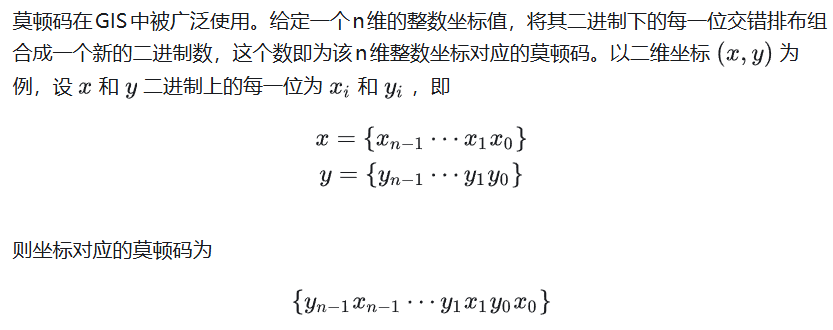
Morton Code
将多维数据映射到一维,同时保留数据点的局部性
空间中相近的坐标,编码后的数值也相近
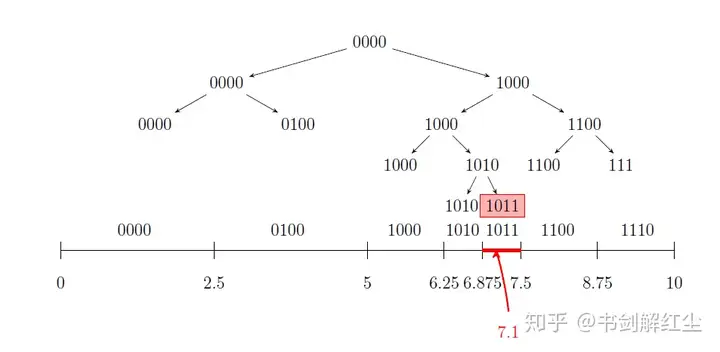
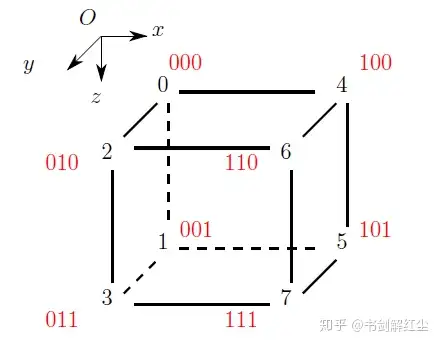
下图展示计算一个XYZ坐标的莫顿编码
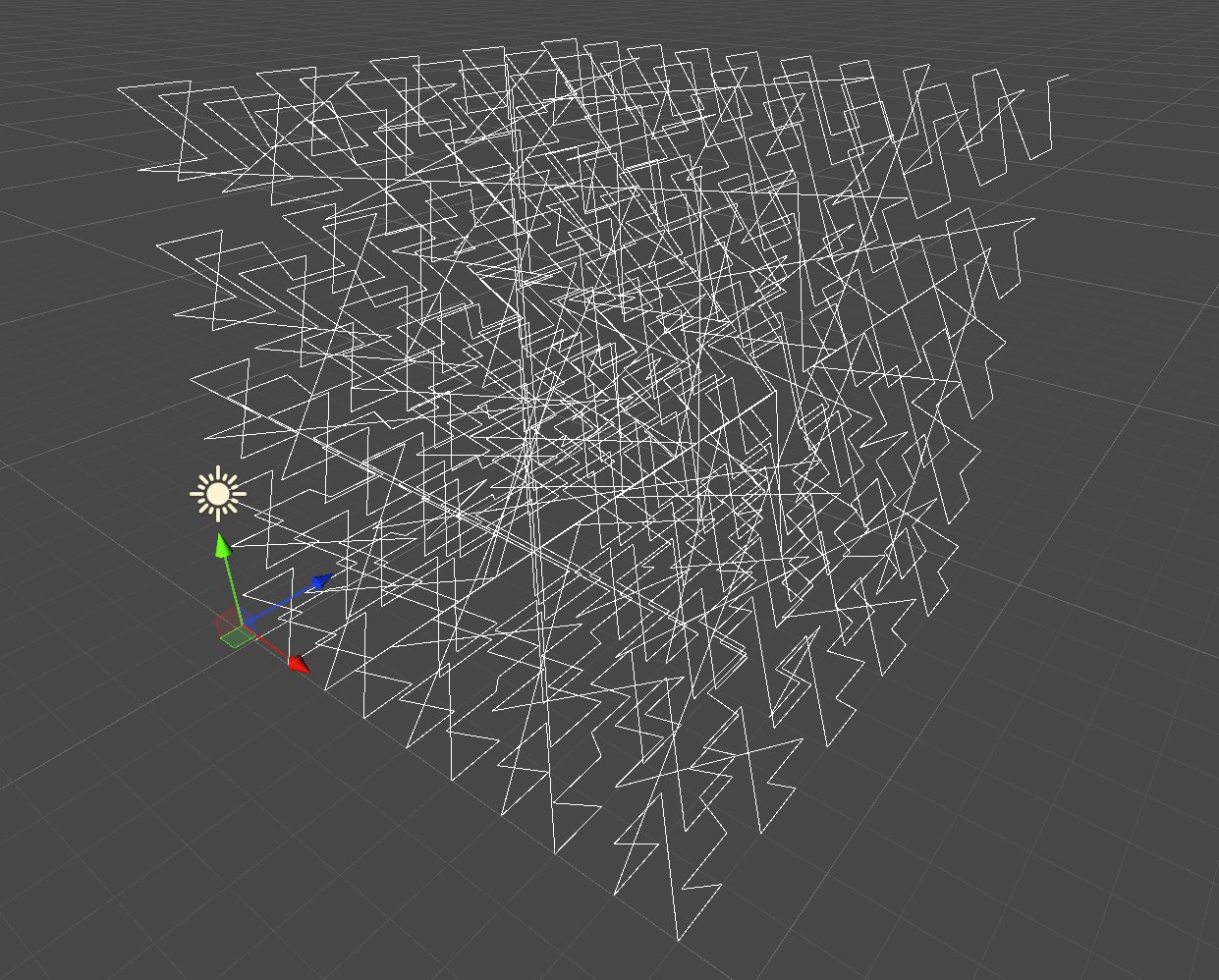
如果把空间中XYZ从0-10都编码并排序后连起来会发现,一维编码表示的空间坐标,在3D空间中有了局部连续性
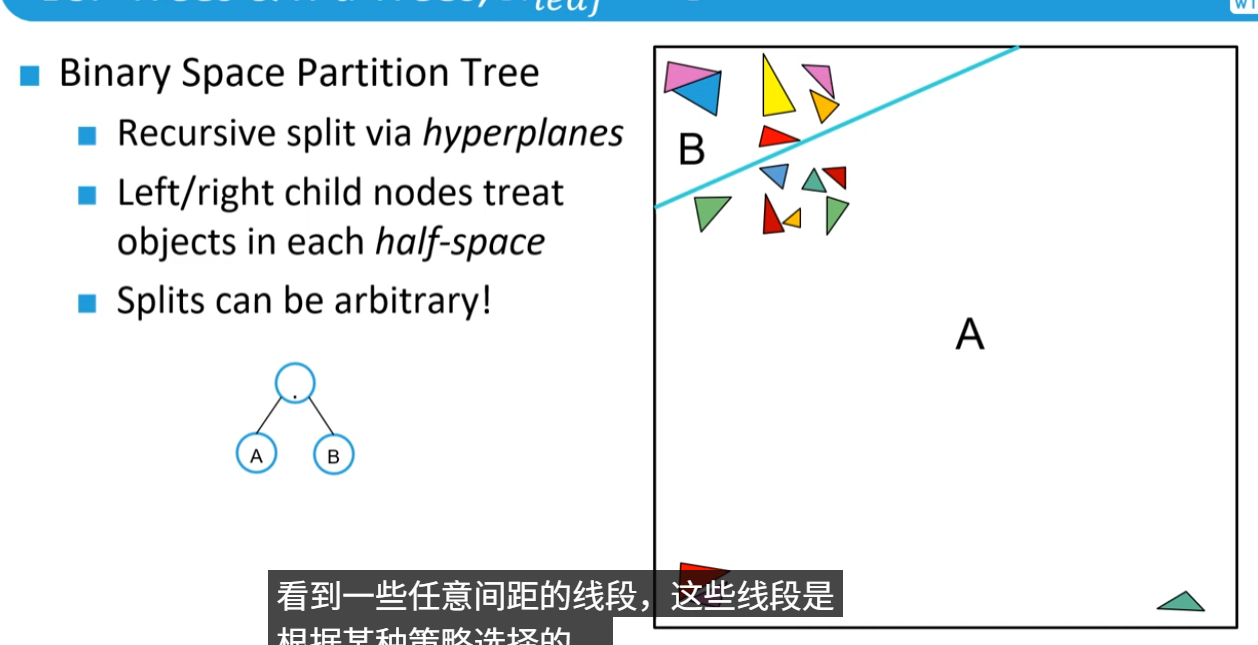
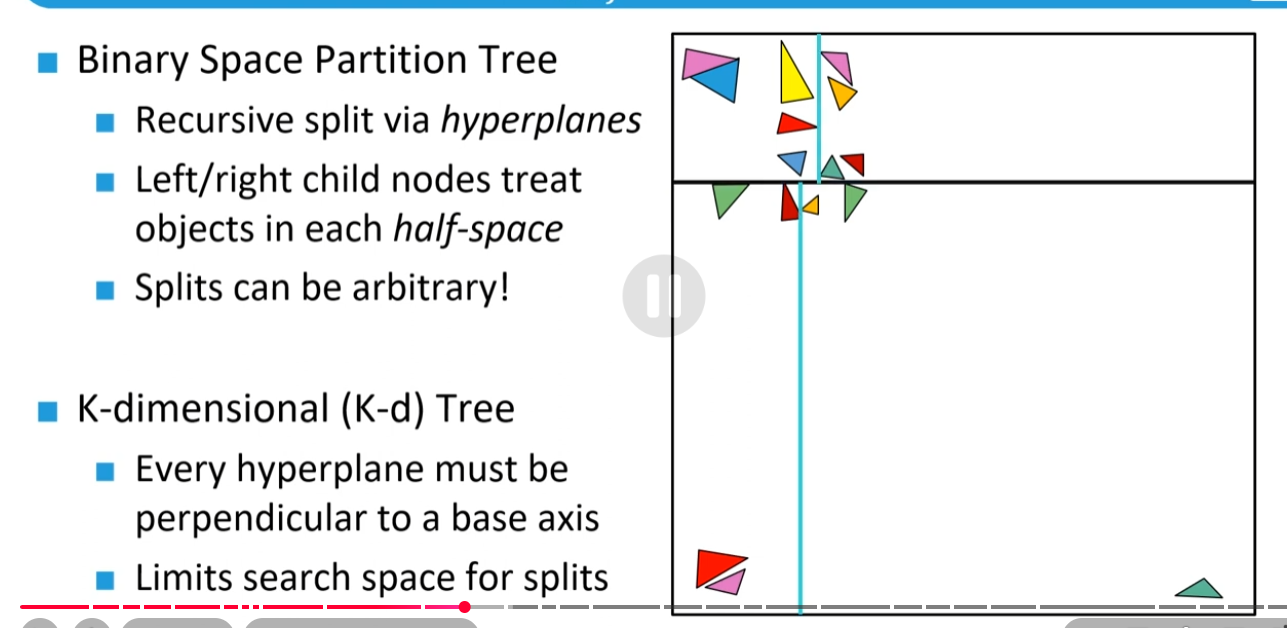
BSP树
递归的用一个超平面去划分场景为两半,划分可以是任意的
继续对AB两个区域进行划分
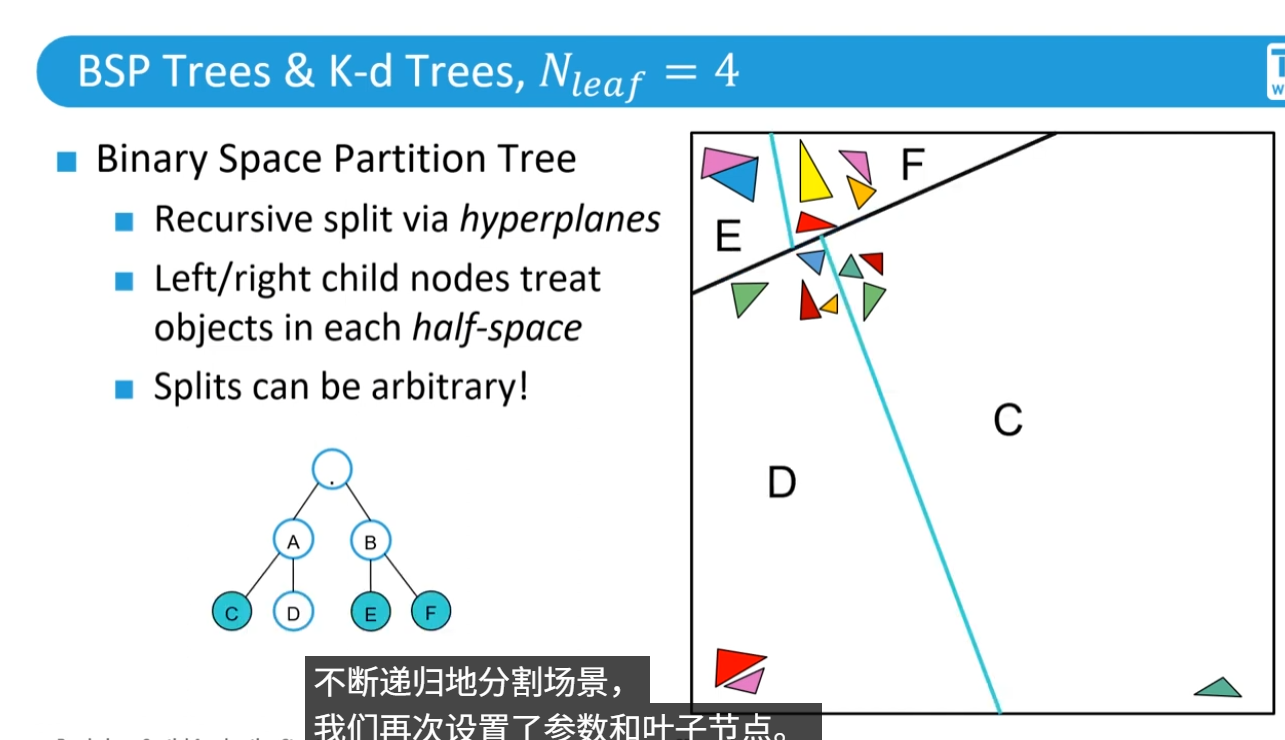
与四叉树类似,当一个区域内的Mesh数量小于阈值后停止分割
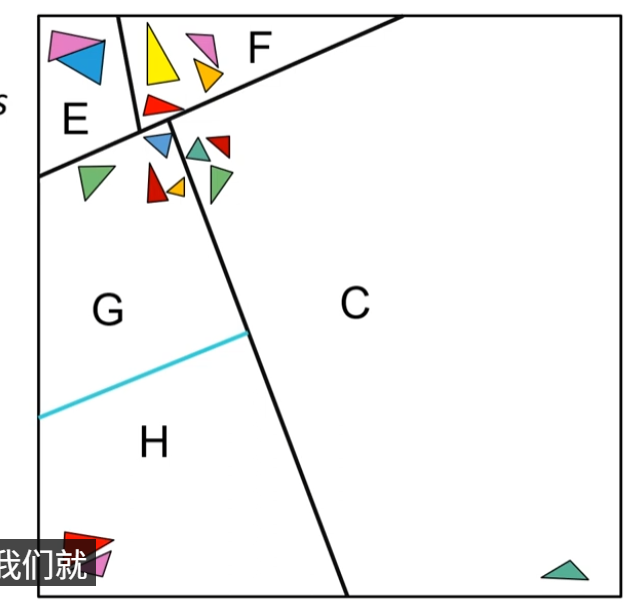
K-d Tree
是BSP树的一种特殊形式,横平竖直地进行分割,而不是随意分割
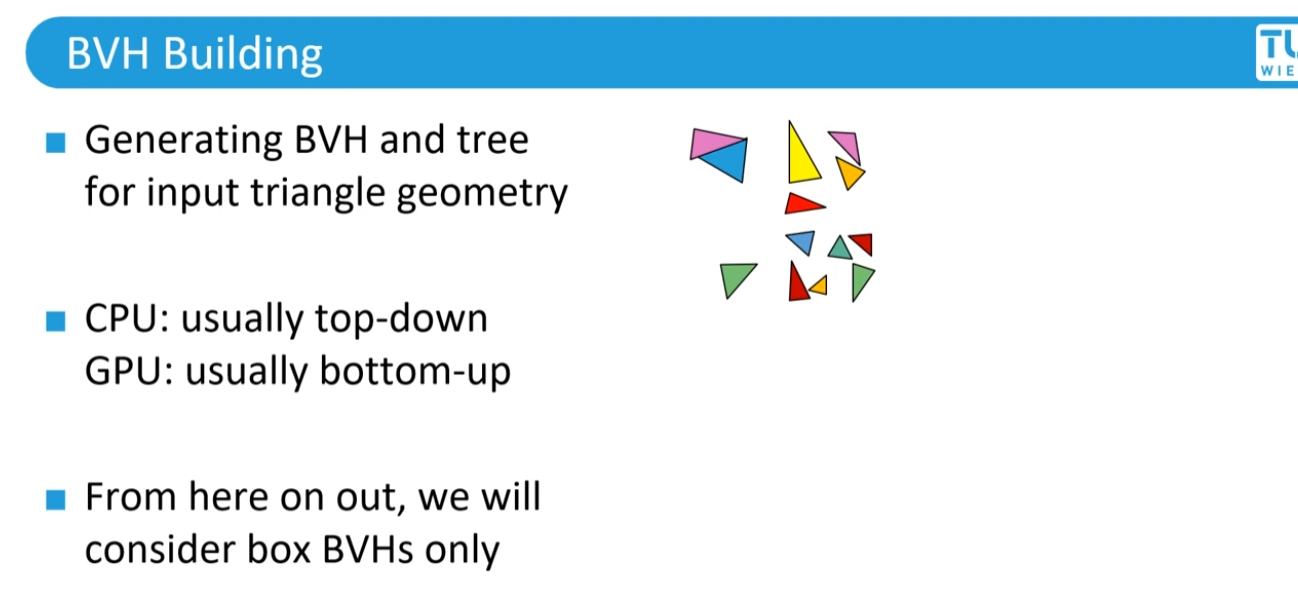
BVH
上述方法都是自顶向下对空间进行划分,看Mesh落在哪个区域,而BVH是从底向上,合并多个Mesh为一个结点,直到合并场景中所有结点
一个关键区别是:BVH运行划分重叠,所以mesh可以安心得只落在一个结点,不会出现一个Mesh落在两个子空间,需要额外处理的情况
构建BVH的关键在于,如果划分左右区间使得左右两个结点的AABB重叠最小
BVH在GPU是bottomUp来构建的
这里注意:以前理解的 BVH构建是自底向上是不全面的,分CPU和GPU两种情况,如下图文字所示
下面是TopDown的流程,Root表示所有三角形组成的AABB,每次都把大的AABB分成两个小的AABB,每个AABB表示一部分三角形组成的AABB
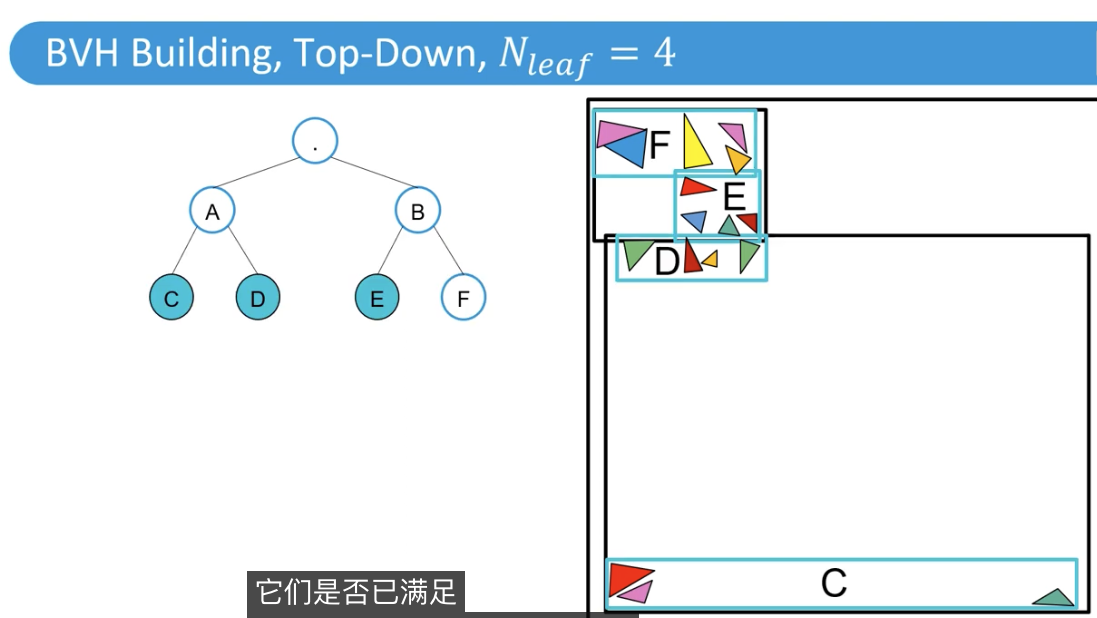
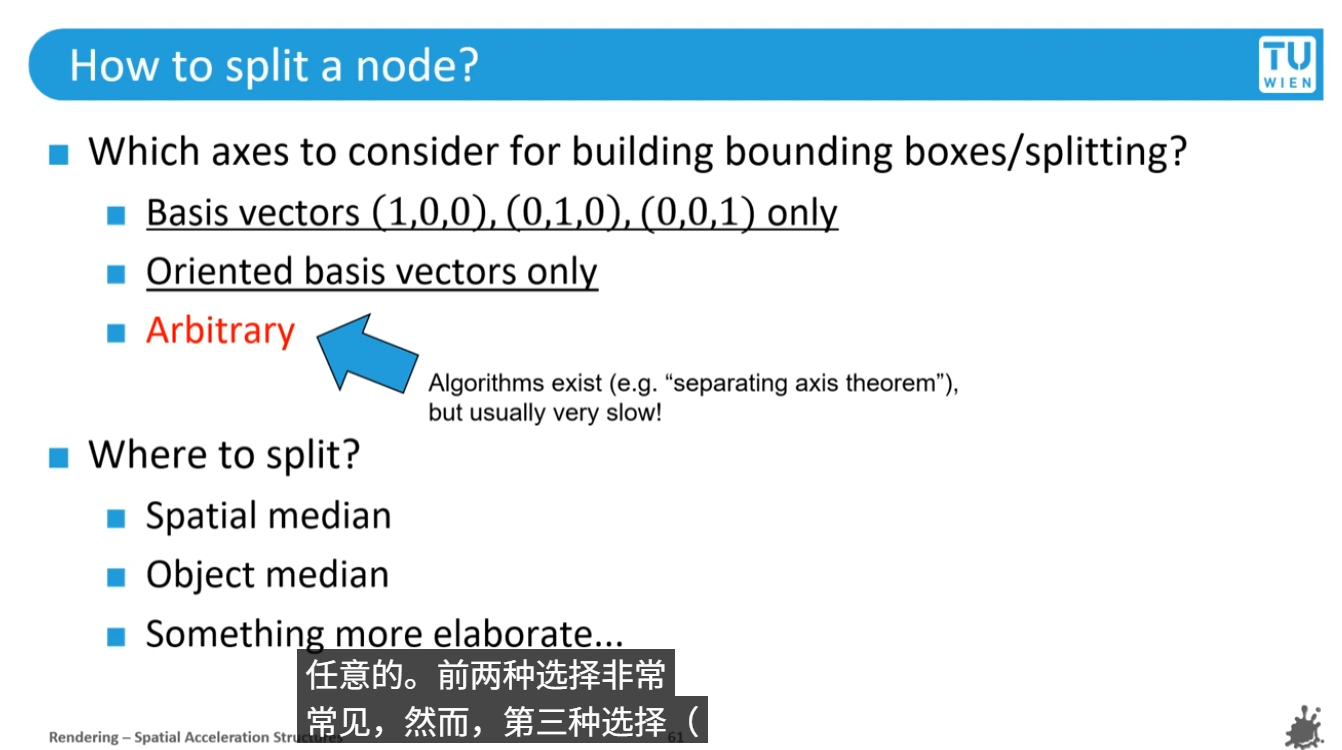
TopDown流程的问题是,怎么去划分呢?
可以选择沿着一条坐标轴进行,或者某个方向
划分可以使用空间的中心或者Mesh的中心
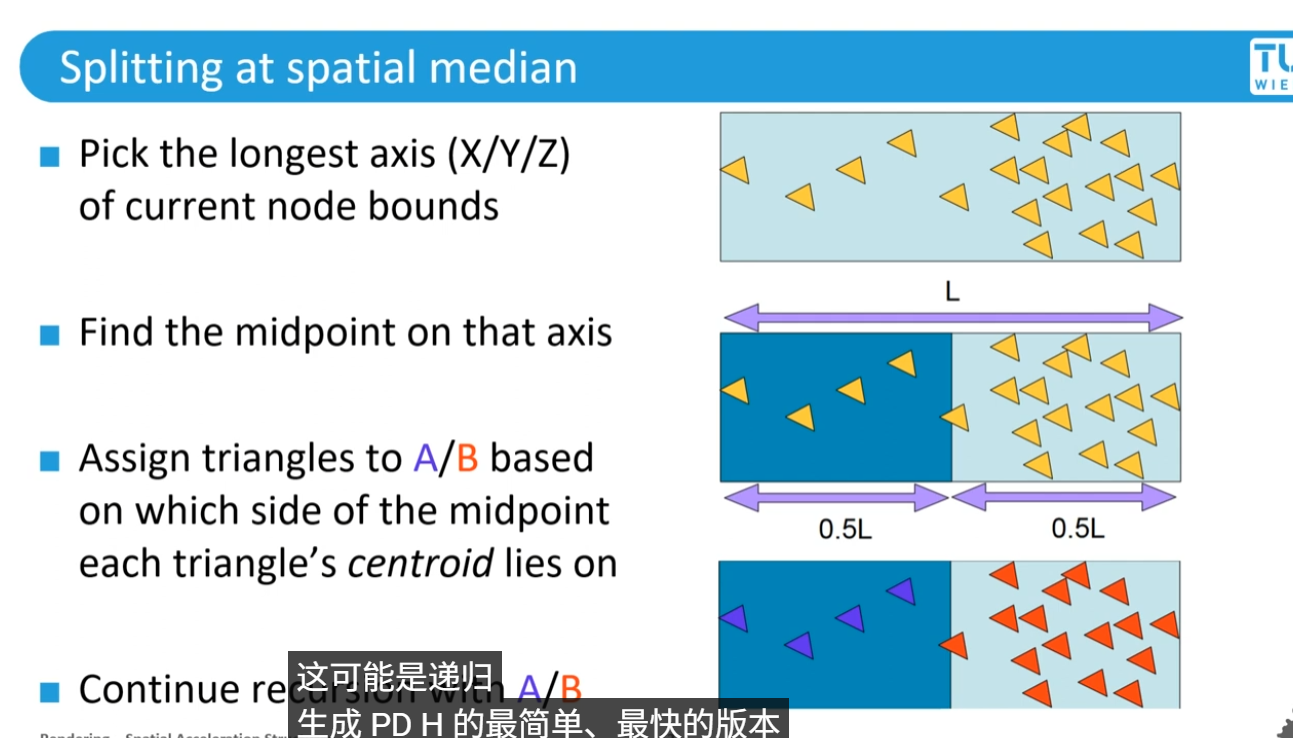
按照空间来划分流程如下,首先选择最长轴,找到终点,分析每个Mesh的中心在这个中点的左侧还是右侧,从而划分两个部分,计算两部分的AABB,这样就划分好了
如何与BVH进行求交运算呢,用一个递归代码就能完成
1
2
3
4
5
6
7
8
9
10
11
|
HitInfo TraverseBVH(Node* node, Ray ray) {
if (!IntersectAABB(ray, node->aabb)) return HitInfo::miss(); // 剪枝
if (node->isLeaf) {
return IntersectTriangles(ray, node->triangles); // 真正的遍历求交
} else {
HitInfo hitLeft = TraverseBVH(node->left, ray);
HitInfo hitRight = TraverseBVH(node->right, ray);
return hitLeft.hitDistance < hitRight.hitDistance ? hitLeft : hitRight;
}
}
|
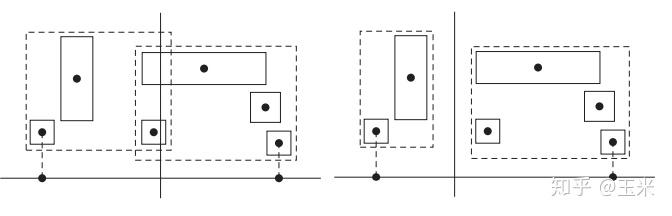
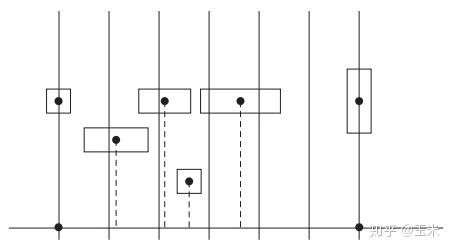
从下图可以理解坐标中点划分并不是一种很好的方式(左图),AABB重叠了,右图是比较好的方式
BVH的SAH(表面积启发式的结点划分方法)
定义数学模型:
- 对一个Mesh求交的代价为t(x),那一批Mesh不分区情况下的总代价为:

- 如果将Mesh分为两区,光线击中某个区域的概率为p(x),此时的代价为(ttrav是表示遍历树状结构的代价):

- 结合BVH来看,AB分别表示划分后两个AABB的表面积,C是父结点的表面积,ab表示划分后各个区域的Mesh数量
从理论上理解:SAH目的是减少求交次数,首先Mesh越多,求交次数就越多,那Mesh所在的区域被击中的概率越大,进入区域去遍历这些Mesh的概率就越大,AABB的表面积越大,选择当前区域的概率越大,所以这两个因素相乘就是代价
八叉树实践
总体上就是递归构建,基本思路不难,估计难得是适配实际情况
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
|
#pragma once
#include "collision.h"
/*
八叉树(目前这个代码跑不了,只是伪代码):
构建: 把所有物体分配给Root,如果Root的物体数量大于MAX_LEAF_OBJECT_COUNT,就创建它的8个孩子,并且把所有物体按照位置分配给孩子(如果没法精确分配给某个孩子,就还是存在Root上),再遍历8个孩子,如果某个孩子物体数量大于MAX_LEAF_OBJECT_COUNT,继续递归构建
添加:判断物体是否包含在Root,包含的话,就判断8个孩子是否完美包含它,如果包含,就递归给孩子去添加,如果都不包含。就存储在当前Root
更新物体位置:判断是否还在同一个结点,如果不在就删除后重写插入,或者有一些论文去查询邻近结点
松散八叉树:
八叉树的用途:(加速遍历Mesh的判断,如果对某个结点的判断失败了,那这个结点以下的Mesh的判断可以完全跳过)
视锥裁剪:用视锥体和Root进行相交判断,如果AABB完全在视锥外,直接剔除Root(剪枝),如果视锥完全包含当前AABB,直接添加当前Root下所有Mesh,如果只是相交,递归检查8个孩子,递归到孩子结点,如果还相交,就添加到可见物体数组
*/
namespace GameEngine {
#define MAX_LEAF_OBJECT_COUNT 4
template<class T>
class OctreeNode {
public:
OctreeNode(BoundingBox& Box) {
AABB = Box;
}
std::vector<T> Objects;
BoundingBox AABB;
std::array<OctreeNode<T>*, 8> children{nullptr};
bool IsStrictContain(T& Object) {
return AABB.IsContains(Object.box);
}
};
template<class T>
class Octree
{
public:
Octree(std::vector<T>& Objects, BoundingBox& Box) {
Root = std::make_shared<OctreeNode<T>>(Box);
CreateChildNode(Root);
GenOctree(Root, Objects);
}
void CreateChildNode(std::shared_ptr<OctreeNode<T>> Root)
{
// TODO: 八个子空间生成,规划每个子空间的范围
// Root->children[0] = new OctreeNode({ xxxx});
}
void GenOctree(std::shared_ptr<OctreeNode<T>> Root,std::vector<T> &Objects) {
// 1. 每个物体划分到当前Root的8个子空间或Root空间中
for (T& obj : Objects) {
bool isPushed = false;
for (OctreeNode<T>* CurSpace : Root->children) {
if(CurSpace->AABB.IsContains(obj.aabb))
{
CurSpace->Objects.push_back(obj);
isPushed = true;
}
}
if (!isPushed) // 没有一个子空间能够完全包住物体,放在父空间中
{
Root->Objects.push_back(obj);
}
isPushed = false;
}
// 2. 判断子空间是否需要继续划分
for (OctreeNode<T>* CurSpace : Root->children)
{
if (CurSpace->Objects.size() > MAX_LEAF_OBJECT_COUNT)
{
CreateChildNode(CurSpace);
GenOctree(CurSpace,CurSpace->Objects);
CurSpace->Objects.clear(); // TODO:如果有物体存在Root上,这行代码就把他删了。。。。
}
}
}
void AddObject(T& Object) {
AddObjectInner(Object, Root);
}
bool AddObjectInner(T& Object, std::shared_ptr<OctreeNode<T>> Root) {
if (!Root) return false;
if (!Root->AABB.IsContains(Object.aabb)) {
return false;
}
bool isHandled = false;
for (OctreeNode<T>* CurSpace : Root->children) {
if (CurSpace && CurSpace->AABB.IsContains(obj.aabb))
{
// 说明子结点插入失败,交给当前结点处理
isHandled = AddObjectInner(object, CurSpace);
}
}
if (!isHandled) {
Root->Objects.push_back(object);
}
return true;
}
private:
std::shared_ptr<OctreeNode<T>> Root = nullptr;
};
}
|
BVH + SAH实践(TODO)
CPU(自顶向下)
CPU上构建BVH主要是TopDown的,SAH用来划分区间
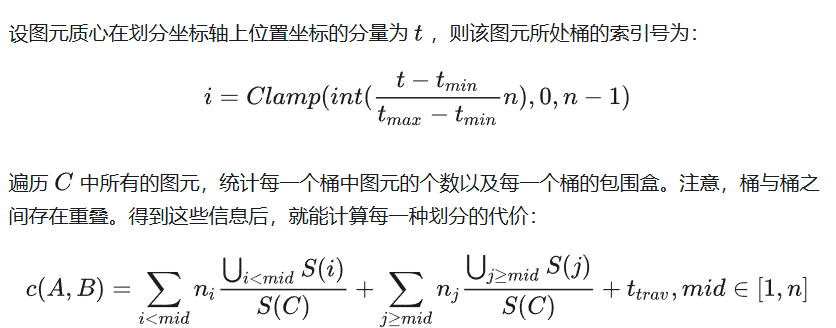
为了减少SAH的计算量,在最长轴上均匀分成若干桶,来减少计算,最终划分只会出现在桶内
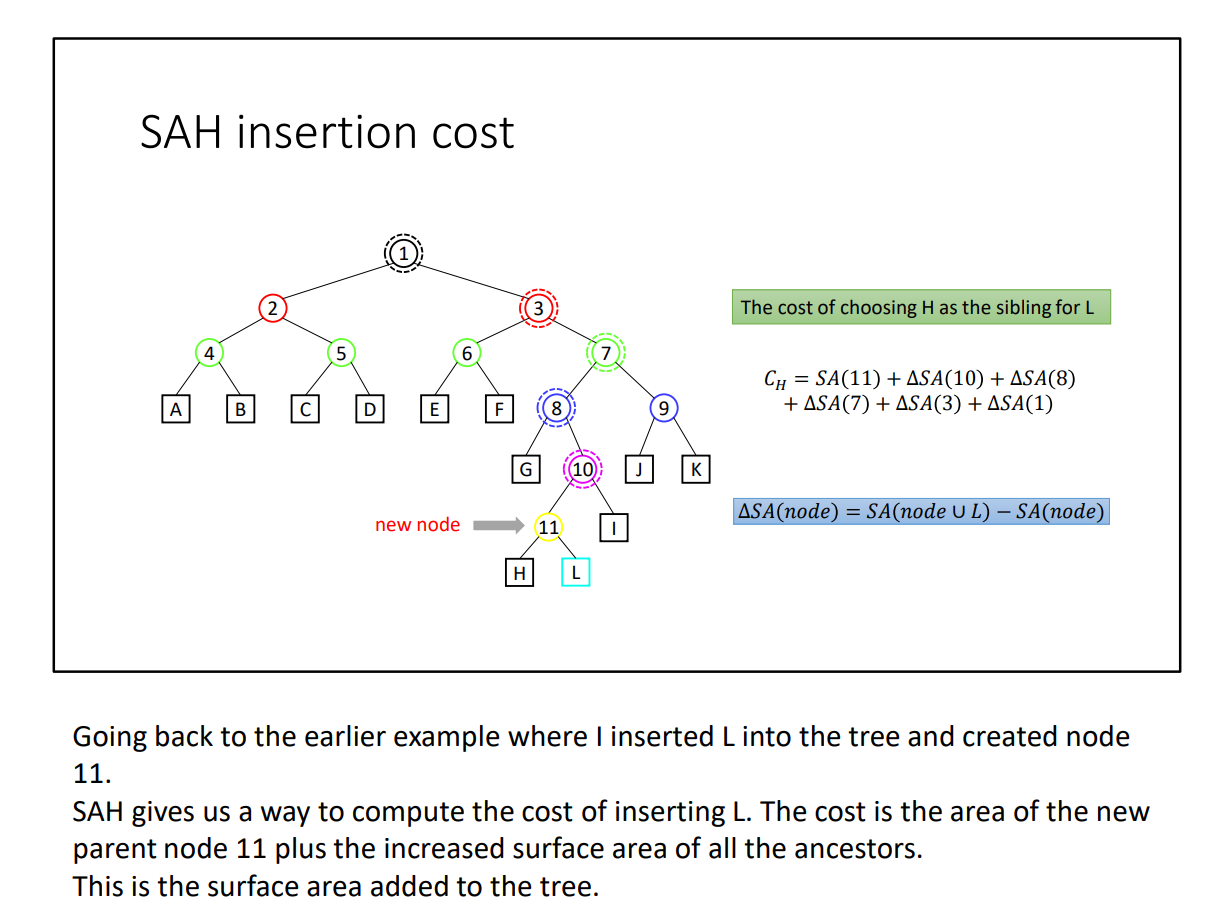
另外插入新结点时插入到哪个叶子结点也是根据SAH,如下图插入L的Cost = 新增的11结点的表面积 + 沿路向上的父结点表面积变化的和
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
|
#pragma once
#include "collision.h"
/*
BVH:(TODO:目前是伪代码,SAH未完成)
构建方式: 计算所有Mesh的AABB在哪个轴上最宽,在这个轴上对Mesh进行排序,根据某种划分算法把Mesh数组分成两部分,分别递归构建子树,直到叶子结点
添加Mesh:首先插入一定发生在叶子结点,依据SAH,判断依哪一个节点的插入会有“最小表面积”的变化,具体计算公式看Blog
*/
namespace GameEngine
{
template<typename T>
class BVHNode {
public:
BVHNode* left = nullptr;
BVHNode* right = nullptr;
BVHNode* parent = nullptr;
std::vector<T> objects;
BoundingBox AABB;
};
template<typename T>
class BVH
{
public:
BVHNode<T>* BuildBVHInner(std::vector<T>&objects, BVHNode<T>* Root) {
// 1. 计算Root的AABB
for (auto& object : objects) {
Root->AABB.Merge(object.aabb);
}
// 创建Root
if(!Root) Root = new BVHNode<T>();
if (objects.size() <= 1) {
Root->objects = objects;
return Root;
}
// 2. 利用SAH算法,对Root进行划分
int lefeMaxIndex = SAHSplit(Root, objects,int left, int right);
// 3. 递归构建左右子树
BVHNode<T>* left = BuildBVHInner(objects.begin() + left, objects.begin() + lefeMaxIndex, Root);
BVHNode<T>* right = BuildBVHInner(objects.begin() + left + lefeMaxIndex, objects.begin() + right, Root);
Root->left = left;
Root->right = right;
left->parent = right->parent = Root;
return Root;
}
// SAH算法,返回划分后left的最大Index
int SAHSplit(BVHNode<T>* node, std::vector<T>& objects, int left, int right) {
}
BVHNode<T>* Root = nullptr;
};
}
|
GPU(自底向上,线性BVH)
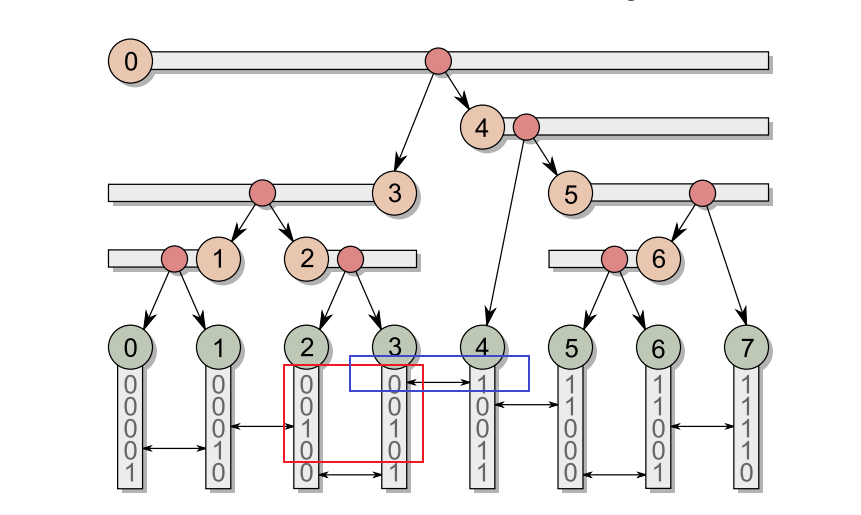
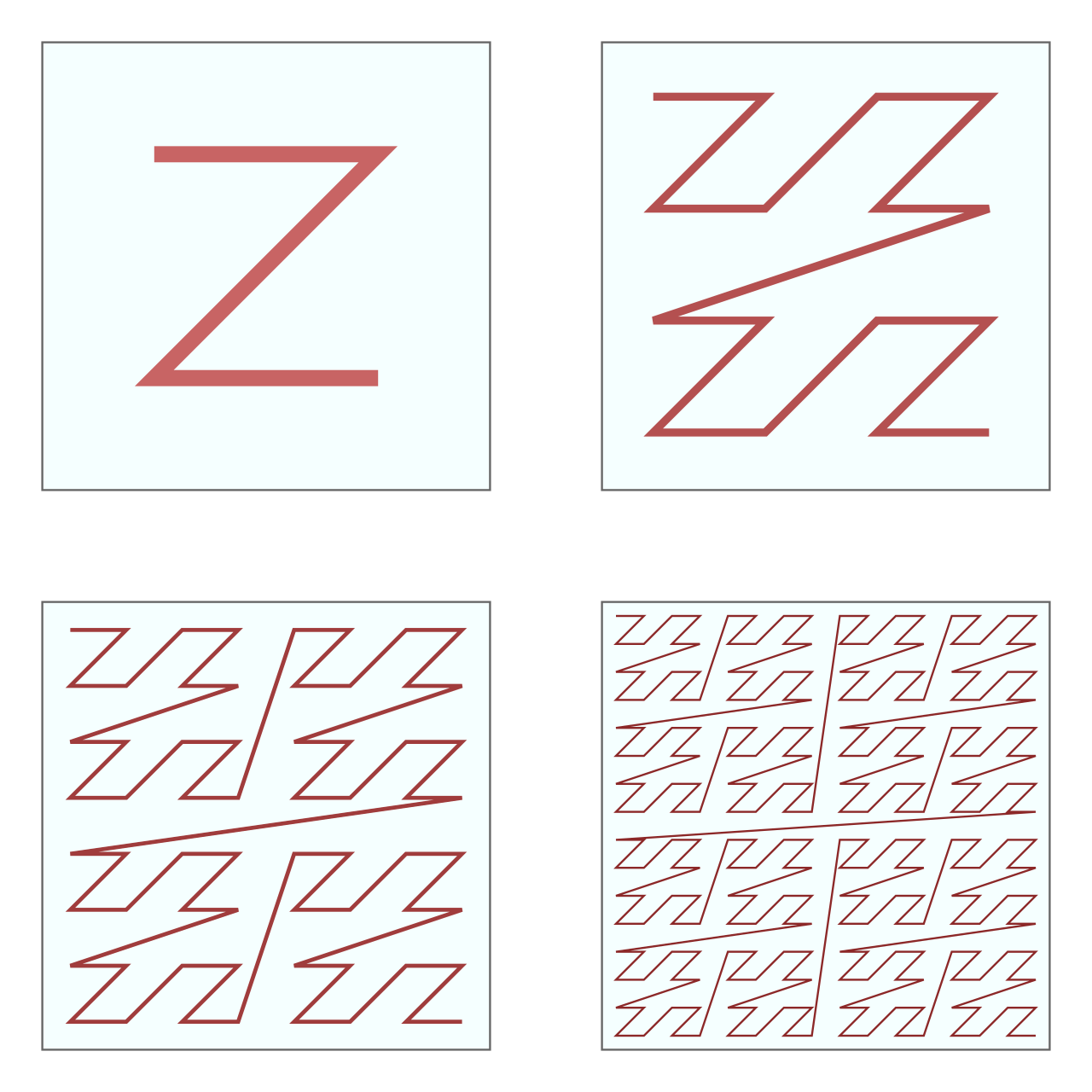
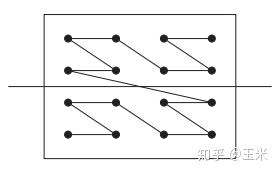
以二维坐标和三维坐标为例,对于每一个点计算其对应的莫顿码,然后利用莫顿码对其进行排序,再将排序后的点按照顺序连接起来就会得到如下图所示的Z形曲线z-order curve
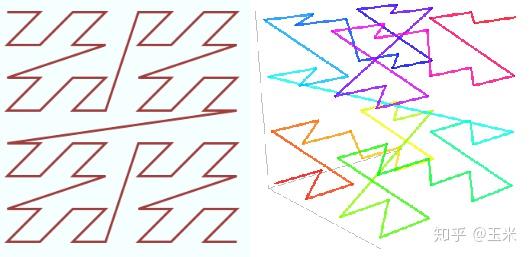
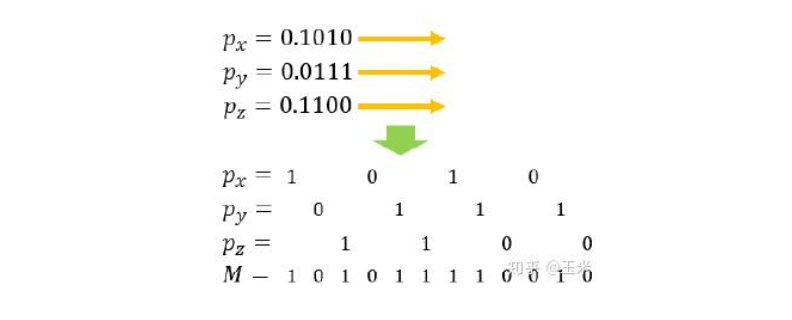
构建莫顿码就是把多维数组成的坐标的每个维度交错排布
比如二维平面上[0-3]范围内的点,全部编码为莫顿编码后,排序连线如下
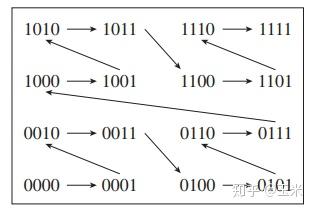
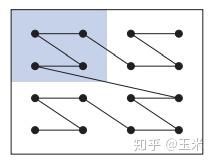
主要观察一点,用最高位0或1就可以把区域划分为上下两部分!
只看第二位,又可以左右划分,这样就划分 成了四个区域
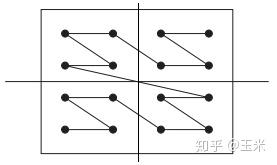
所以莫顿编码 第一位为1,第二位为0的区域一定在左上角!
对于三角形图元,编码它的方式为 xyzmin表示整个场景的最小点,lwh是场景的宽度
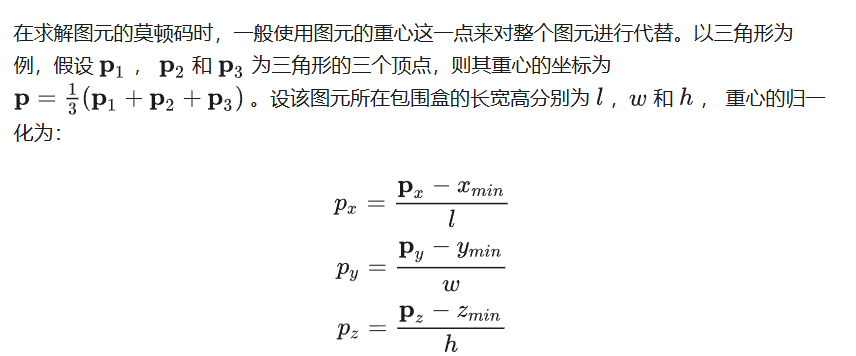
按这种方式计算后P就代表这个三角形在AABB盒中的位置,接下来对P进行莫顿编码
构建BVH时,按照上边方法生成所有图元的编码,然后进行基数排序
这里基数排序回忆一下
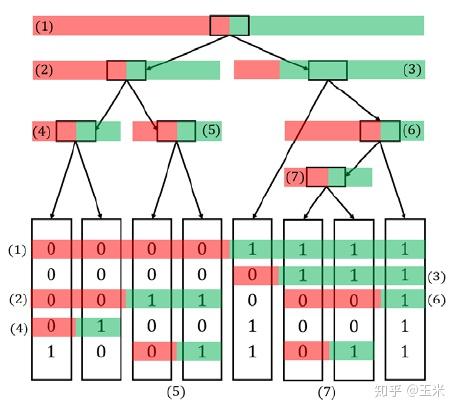
排序完成后,再按照最长公共前缀来进行切分
切分就是按照当前位是0还是1(其实不是看一位,而是最长公共前缀,比如前几个都是00),同样是0的说明在空间上是接近的
这种方式仍然是自顶向下的,下面介绍从底向上的GPU的构建办法
首先第一点:一个二叉树,叶子结点有N个时,非叶子结点一定有N-1个