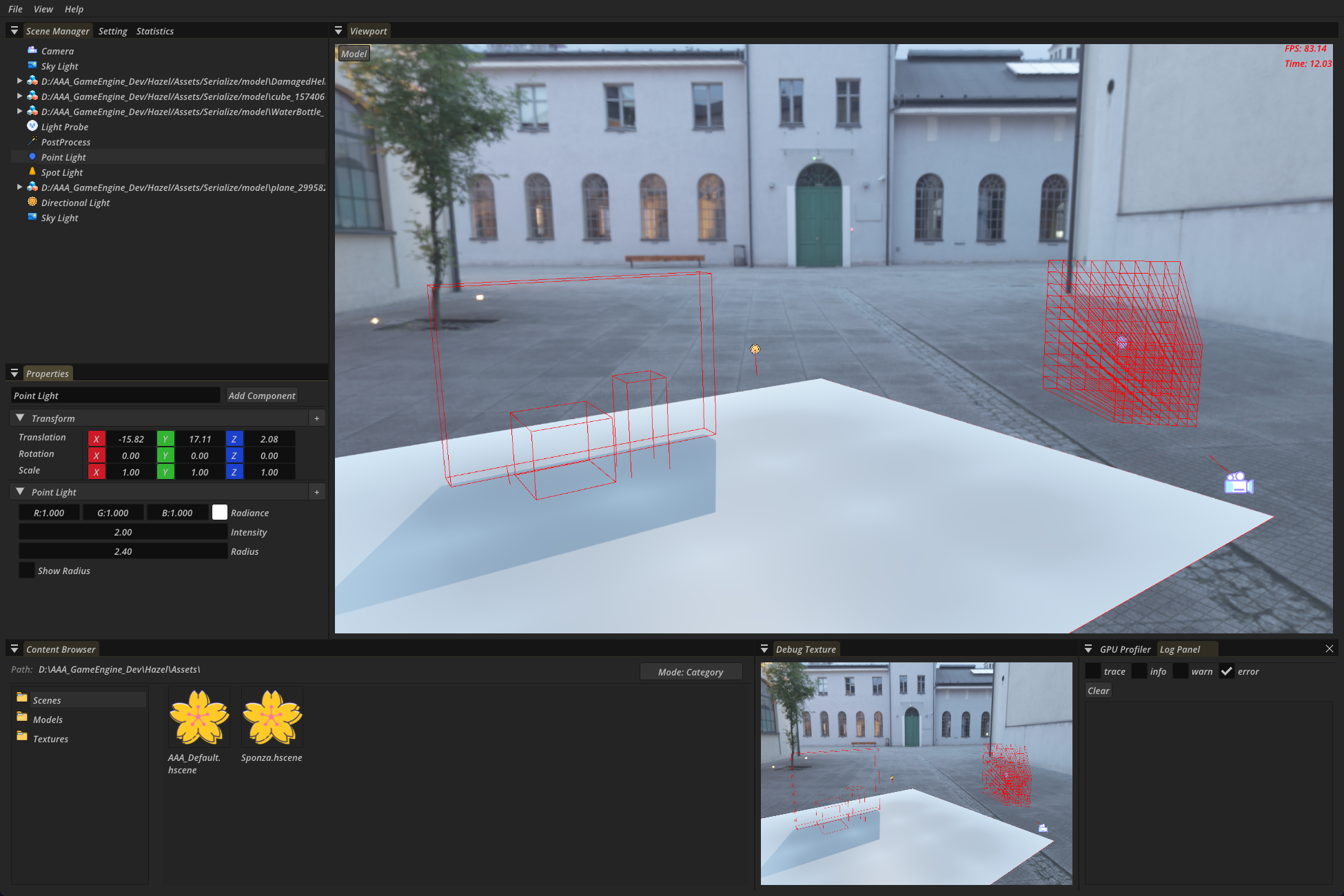
上图展示了Mesh被另外一个摄像机剔除(剩下了AABB盒)、摄像机视锥被灯光影响的分簇结果
间接绘制
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
|
void VulkanRHICommandContext::DrawIndirect(RHIBufferRef argumentBuffer, uint32_t offset, uint32_t drawCount)
{
/*
* 绘制指令参数:
//indexed draw
VKAPI_ATTR void VKAPI_CALL vkCmdDrawIndexedIndirect(
VkCommandBuffer commandBuffer,
VkBuffer buffer, // 存储绘制参数的Buffer
VkDeviceSize offset, // Buffer起始偏移
uint32_t drawCount, // 绘制的次数
uint32_t stride); // Buffer中每个绘制指令的大小
//non indexed draw
VKAPI_ATTR void VKAPI_CALL vkCmdDrawIndirect( // 参数与vkCmdDrawIndirect一致
VkCommandBuffer commandBuffer,
VkBuffer buffer,
VkDeviceSize offset,
uint32_t drawCount,
uint32_t stride);
绘制Buffer参数:这个Buffer中存储的参数实际就是直接调用vkCmdDrawIndexed、vkCmdDraw需要的参数
//indexed
struct VkDrawIndexedIndirectCommand {
uint32_t indexCount; // 索引数量
uint32_t instanceCount; // 实例数量
uint32_t firstIndex; // 索引偏移
int32_t vertexOffset; // 顶点偏移
uint32_t firstInstance; // 实例偏移
};
//non indexed
typedef struct VkDrawIndirectCommand {
uint32_t vertexCount; // 顶点数量
uint32_t instanceCount; // 实例数量
uint32_t firstVertex; // 顶点偏移
uint32_t firstInstance; // 实例偏移
} VkDrawIndirectCommand;
*/
vkCmdDrawIndirect(handle, CAST<VulkanRHIBuffer>(argumentBuffer)->GetHandle(), offset, drawCount, sizeof(RHIIndirectCommand));
}
|
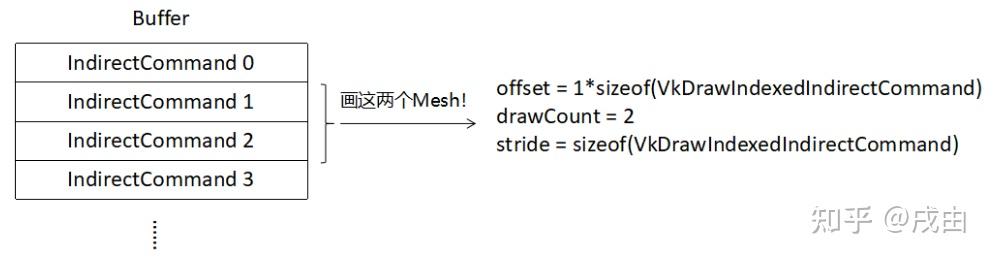
在支持Multi Draw时,一次API可以提交多个IndirectCommand绘制指令,drawCount参数为执行指令的数量,这样在多个Mesh共享同一个VBO和IBO的情况下,可以做到画多种Mesh只需要一次API提交。
这样使用的前提是Draw的context是一致的,中间不能切换(如果使用bindless的话,需要弄清楚怎么把Id传递进去)
另外一点,这个属于新特性,老的设备不支持Multi Draw
图片来自:https://zhuanlan.zhihu.com/p/362994106
Mesh剔除
基本思路就是使用ComputerShader提前剔除不需要渲染的DrawCall,创建Buffer->准备好剔除前的数据->上传到GPU->用HiZ对这些instance剔除 ->写buffer->传给api去绘制
这里的Hiz是用的上一帧的Hiz,毕竟还没处理好Mesh信息,这一帧还没有深度信息
是否支持实例化?
增加实例化后,每个RHIIndirectCommand的instanceCount将不再是1,也就是说一个DrawCallBuffer需要包含多个实例。 但剔除并不是连续操作,比如实例100、101、102、103合并到一个DrawCallBuffer后,如果101被剔除。剩下100、102。DrawCallBuffer很好改(实例数量-1,起始实例仍然是100),但是因为101被剔除,那顶点着色器就无法连续操作。必须添加额外信息Buffer来支持。让顶点着色器知道自己处理的是哪个实例!总之,考虑到实例化会大大增加流程的复杂性。不考虑合并实例。
// TODO:DrawIndirectCountKHR 可以间接填写Buffer的数量,这样的话,可以在剔除时把没有被剔除的Buffer紧密排布,并且更新BufferCount,这样的好处就是剔除后的DrawCall不会像老方法一样,生成一条空的DrawCall
最终架构:
- CPU端:每个Pass收集自己需要的MeshBatch,将MeshBatch按照PSO进行分类。相同PSO的MeshBatch最终被放在同一个MeshDrawCommand,通过一次DrawCall全部上传,同时把所有对应的间接渲染指令组成一个Buffer,一并上传至GPU(并且携带InstanceCount和CullingType用于GPU执行不同的剔除流程)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
|
enum CullingType :uint32_t {
CULLING_TYPE_BASE,
CULLING_TYPE_DIRECTIONLIGHT_SHADOW,
CULLING_TYPE_POINTLIGHT_SHADOW,
CULLING_TYPE_MAX_CNT
};
/*
为了方便剔除时拿到详细信息,上传的Buffer不能只包含绘制指令,还需要记录实例数量,如果后续需要更多信息,可以扩展这个结构体
*/
struct MeshIndirectDrawData {
uint32_t instanceCount;
CullingType passType;
uint32_t _padding[2];
std::array<RHIIndirectCommand, MAX_PER_FRAME_INSTANCE_SIZE> indirectCommands;
};
/*
最终定义一次DrawCall需要的信息
1. 使用的PSO
2. 间接绘制Buffer的Batch(PSO一致的绘制指令可以一次性全部上传)
*/
struct MeshDrawCommand
{
RHIGraphicsPipelineRef pipeline;
IndexRange meshCommandRange = { 0, 0 };
};
class MeshPassProcessor {
public:
void Init(CullingType PassType);
void Process(const std::vector<MeshBatch>& drawBatches);
void Draw(RHICommandListRef command);
void AddBatch(const MeshBatch& batch) { m_MeshBatches.push_back(batch); }
void OnBuildDrawCommands(RHIGraphicsPipelineRef pipeline, std::vector<MeshBatch>& meshBatch);
uint32_t GetDrawCommandCount() { return m_MeshBatches.size(); }
RHIBufferRef GetMeshIndirectDrawDataBuffer() { return m_MeshIndirectDrawDataBuffer[APP_FRAMEINDEX]->GetRHIBuffer(); }
protected:
virtual void MeshPassProcessor::AddMeshBatch(const MeshBatch& batch) = 0;
virtual RHIGraphicsPipelineRef OnCreatePipeline(const DrawPipelineState& first) = 0;
private:
void MapMeshBatches(MeshBatch& batch);
private:
std::vector<MeshBatch> m_MeshBatches; // 收集当前Pass需要的batch
CullingType m_PassType;
std::array<std::shared_ptr<RenderBuffer<MeshIndirectDrawData>>, FRAMES_IN_FLIGHT> m_MeshIndirectDrawDataBuffer;
std::map<DrawPipelineState, std::vector<MeshBatch>> m_MeshBatchMap;
std::vector<MeshDrawCommand> m_MeshDrawCommands; // 存储这个是为了Draw的时候遍历
std::vector<RHIIndirectCommand> m_IndirectCommands; // 存储这个是为了把Commands一口气上传
};
using MeshPassProcessorRef = std::shared_ptr<MeshPassProcessor>;
|
- 渲染时,通过MeshDrawCommand中提前记录的偏移,直接指定Buffer的offset和DrawCount(此时的Buffer已经被剔除了,被提出的渲染指令实例数量被设置为0)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
void MeshPassProcessor::Draw(RHICommandListRef command) {
for (auto& drawCommand : m_MeshDrawCommands)
{
auto [w, h] = APP_WINDOWSIZE;
command->SetGraphicsPipeline(drawCommand.pipeline);
if (drawCommand.meshCommandRange.size > 0)
{
command->DrawIndirect(
m_MeshIndirectDrawDataBuffer[APP_FRAMEINDEX]->GetRHIBuffer(),
4 * sizeof(uint32_t) + drawCommand.meshCommandRange.begin * sizeof(RHIIndirectCommand),
drawCommand.meshCommandRange.size);
}
}
}
|
GPU端:通过 gl_GlobalInvocationID.x获取实例ID,通过gl_GlobalInvocationID.y获取剔除类型,将不可见的实例buffer的实例数量设置为0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
|
#version 450 core
#include "../common/common.glsl"
#include "../common/constant.glsl"
#include "../common/intersection.glsl"
#ifdef COMPUTE_SHADER
const uint MESH_PASS_TYPE_BASE = 0u;
const uint MESH_PASS_TYPE_DIRECTIONLIGHT_SHADOW = 1u;
const uint MESH_PASS_TYPE_POINTLIGHT_SHADOW = 2u;
#define LOCAL_X 32 // instance
#define LOCAL_Y 1 // MeshPassType
#define LOCAL_Z 1
layout(set = 1,binding = 0) buffer drawbuffer{
uint instanceCount;
uint passType;
uint _padding[2];
RHIIndirectCommand buffers[MAX_PER_FRAME_INSTANCE_SIZE];
} ALL_CULLING_BUFFERS[4];
layout(local_size_x = LOCAL_X, local_size_y = LOCAL_Y, local_size_z = LOCAL_Z) in;
void main()
{
uint threadInstanceId = gl_GlobalInvocationID.x;
uint passTypeId = gl_GlobalInvocationID.y;
if(threadInstanceId >= ALL_CULLING_BUFFERS[passTypeId].instanceCount){
return;
}
uint instanceId = ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].firstInstance;
// 摄像机剔除
if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_BASE){
}else if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_DIRECTIONLIGHT_SHADOW){ // 定向光剔除
ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].instanceCount = 0u;
}else if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_POINTLIGHT_SHADOW){ // 点光剔除
}
}
#endif
|
剩下的工作就是各种求交测试,判断可见性了
相交判断
摄像机的范围定义为视锥Frustum,一个平面定义为$ax + by + cz + d = 0$,每个平面可以用glm::vec4来表示,摄像机的视锥范围就可以用6个平面代替,根据平面方程的性质,(a,b,c)就是这个平面的法线
获取视锥平面
首先需要定义视锥,视锥体由六个面组成
使用union来方便给Shader进行统一架构,因为GPU剔除时并不需要知道当前判断的是哪个平面的相交,只需要一次遍历6个面即可
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
struct Frustum
{
union
{
struct
{
glm::vec4 planeRight;
glm::vec4 planeLeft;
glm::vec4 planeTop;
glm::vec4 planeBottom;
glm::vec4 planeNear;
glm::vec4 planeFar;
};
glm::vec4 planes[6];
};
};
|
下面工作就是如何计算当前摄像机的6个平面了
如何构造一个平面?
- 法线量 + 一个点 定义一个平面
- 三个点确定一个平面(其实通过三个点构造两个向量,对两个向量叉乘即可得到法向量,这样也就转化成了第一种情况)
-
对于Far和Near两个平面,法向量: 摄像机的forward向量,点: 用camera.position + forward * (near或者far的距离)
-
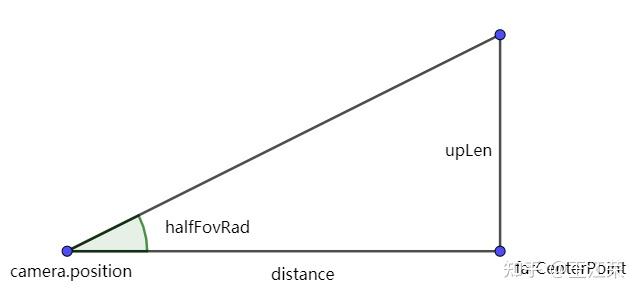
对与上下左右四个平面,摄像机的位置始终经过四个平面,点就确定了。法向量需要叉乘来实现,具体步骤就是先计算远平面的4个交点的坐标,与摄像机位置构成两个向量叉乘后得到法向量
求Far平面坐标用Fov来求
上面的方法从理论上很好理解,但是下面的方法是直接从viewPorj矩阵中计算出来6个平面的vec4
下面这种方案是在寻找对空间中点的约束,来构造平面方程。 约束条件就是 视锥平面上任何一点(世界坐标系下)进行VP变换后,要在NDC范围的边界上,从而构建一个等式求解的
首先VP矩阵的意义就是把世界坐标下的点$\vec{P}=(x,y,z,1)$转移到NDC空间,经过变换后的点表示为$\vec{P_{clip}}=(x_c, y_c, z_c, w_c)$
以右裁剪面为例。$(x_c = w_c)$是NDC最大支持的右边界(这个本质就是透视除法后,xc=1是最大边界)。
再来看VP矩阵 * 一个列向量(世界空间顶点位置),计算过程就是(注意这里的取值是按照列主序进行的)
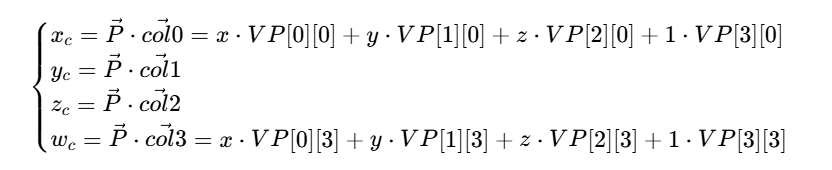
把计算过程带入$(x_c = w_c)$得到
这也就是说世界空间点P与VP矩阵满足上边这个关系的点都在视锥的右面。把这个约束展开

也就得到了平面方程(本质就是空间中的点满足这个约束的点集组成的平面,这种方法就是在寻找这种约束)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
|
Frustum CreateFrustumFromMatrix(const glm::mat4& VP)
{
Frustum frustum;
// 右平面
frustum.planeRight = glm::vec4(
VP[0][3] - VP[0][0],
VP[1][3] - VP[1][0],
VP[2][3] - VP[2][0],
VP[3][3] - VP[3][0]
);
// 左平面
frustum.planeLeft = glm::vec4(
VP[0][3] + VP[0][0],
VP[1][3] + VP[1][0],
VP[2][3] + VP[2][0],
VP[3][3] + VP[3][0]
);
// 上平面
frustum.planeTop = glm::vec4(
VP[0][3] - VP[0][1],
VP[1][3] - VP[1][1],
VP[2][3] - VP[2][1],
VP[3][3] - VP[3][1]
);
// 下平面
frustum.planeBottom = glm::vec4(
VP[0][3] + VP[0][1],
VP[1][3] + VP[1][1],
VP[2][3] + VP[2][1],
VP[3][3] + VP[3][1]
);
// 远平面
frustum.planeFar = glm::vec4(
VP[0][3] - VP[0][2],
VP[1][3] - VP[1][2],
VP[2][3] - VP[2][2],
VP[3][3] - VP[3][2]
);
// 近平面
frustum.planeNear = glm::vec4(
VP[0][3] + VP[0][2],
VP[1][3] + VP[1][2],
VP[2][3] + VP[2][2],
VP[3][3] + VP[3][2]
);
// 归一化
auto normalizePlane = [](glm::vec4& p)
{
float len = glm::length(glm::vec3(p));
p /= len;
};
normalizePlane(frustum.planeRight);
normalizePlane(frustum.planeLeft);
normalizePlane(frustum.planeTop);
normalizePlane(frustum.planeBottom);
normalizePlane(frustum.planeNear);
normalizePlane(frustum.planeFar);
return frustum;
}
|
上边第二个方案相比第一个方案计算量就少很多了
视锥与AABB相交
计算AABB的8个角点,是否都在视锥体外部
判断思路就是,如果8个角点都在面的同一侧,那么整个AABB盒都在面的一侧(与面没有相交)
判断如果AABB盒在6个面的同一侧,那他肯定就没有相交
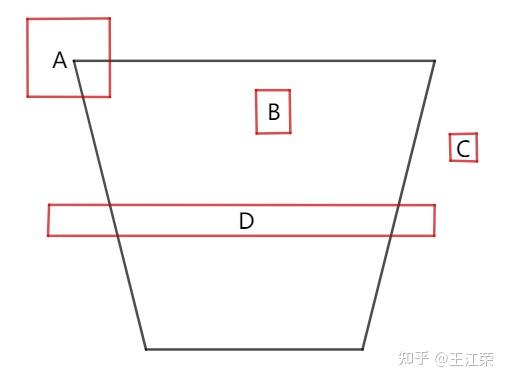
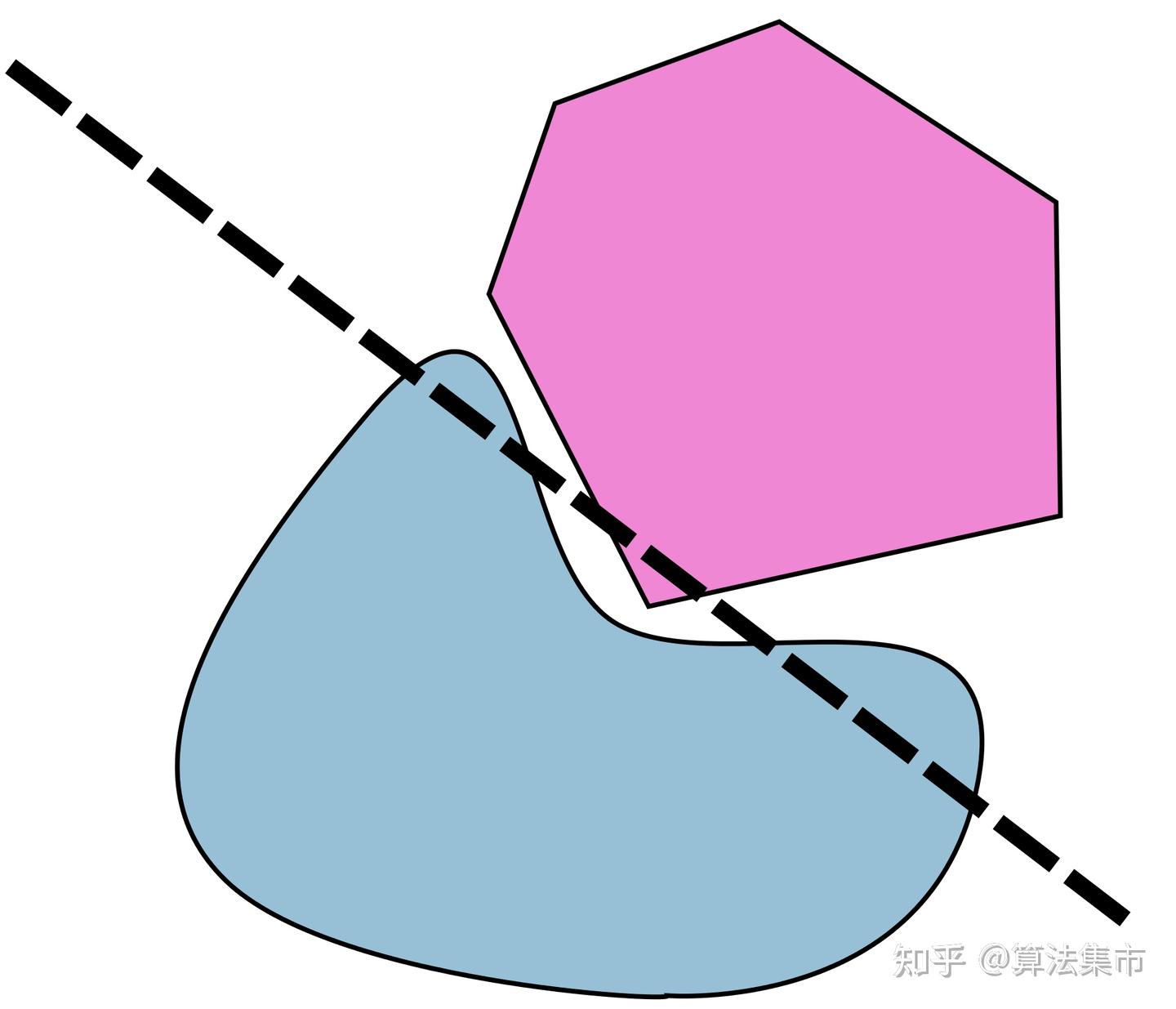
首先注意,不能反过来求是否有角点在视锥体内部,来判断相交,原因如下图,D的角点都在外部,但是他在视锥体内部
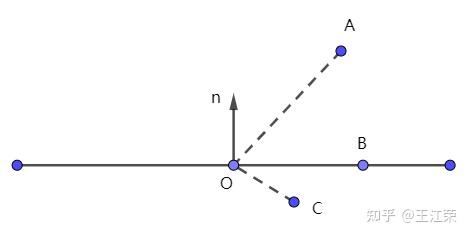
如何判断一个点在平面的哪一侧呢?
在下图场景中,OA与法线的cos即可判断,大于0不就是与法线在同一侧呗,或者直接把点带入平面方程,如果结果大于0,那他就在法向量的同侧
如果8个点在任意一个视锥面的外侧,那这个AABB盒就在视锥体外侧
同样,以上方法是逻辑上很清晰的代码,但是实践中为了效率,有更好的方法
SAT 分离轴定理
对于两个凸几何体 A 和 B,若存在一条直线(轴),使得 A 和 B 在这条轴上的投影互不重叠,则称这条轴为「分离轴」,此时 A 和 B 不相交;若不存在这样的分离轴,则 A 和 B 相交(或包含)。也就是说只要找到一条轴能分离,那两个物体肯定不相交
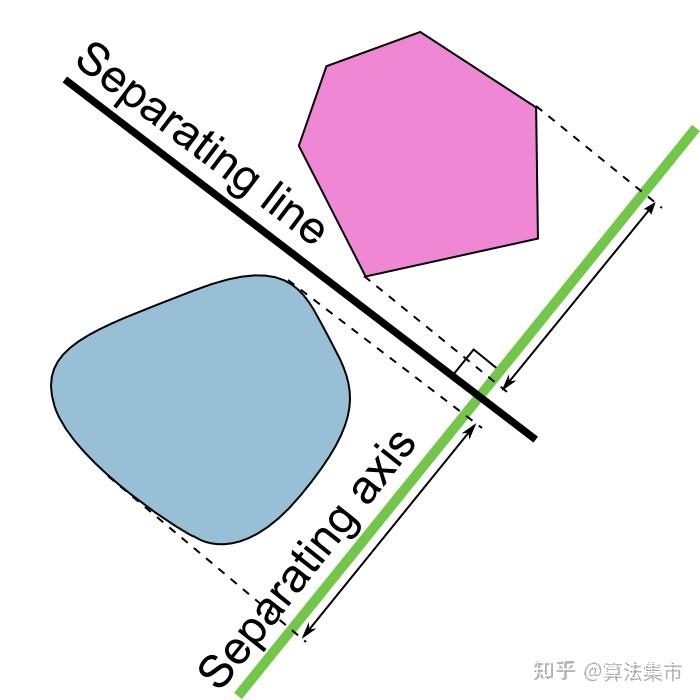
对于很规则的形状,只需要依次在每条边的垂直线做投影即可
注意不适用于凹多面体
在当前场景下,视锥的分离轴就只有6个(6个平面的法向量)
所有AABB盒与平面的相交判断,集中在平面的法向量这条分离轴上。十分精炼的代码还是需要一步步理解
首先平面在分离轴上如何定义?
因为分离轴是平面的法线,所以在分离轴上来看,平面是一个点。
那如何表达平面在分离轴的位置呢?(也就是说得先定义一个分离轴的原点) 把原点作为分离轴的原点 (在写这个的时候忽略了一个点,法线肯定是过原点来定义的,所以分离轴肯定是过原点的,另外分离轴的空间位置是没有意义的,因为投影后结果都是一样的,所以放在原点也比较合理)
这时平面在分离轴的坐标就是(-d) (拿一个简单的平面画图推一下就能看出来)
到这里 分离轴代表的1D坐标系已经有了。
下一步理解AABB如何投影到这个坐标系上
AABB的每个点都可以定义为从000到点位置的向量,然后把他投影到了分离轴上,下一步就是求AABB在分离轴上的范围
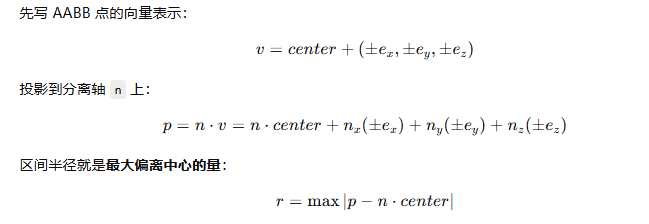
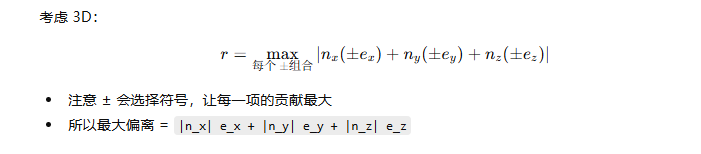
到这里就理解了最大偏移,也理解了项目代码中那个蜜汁操作的含义
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
/*
当前Frustum的6个平面的法向量都指向内部
这里的相交判断利用的是SAT(分离轴定理),平面的法向量方向作为分离轴,这时,整个平面在分离轴上就只是一个点,
*/
bool FrustumIntersectBox(Frustum frustum, BoundingBox box)
{
vec3 center = (box.maxBound + box.minBound) * 0.5;
vec3 extent = (box.maxBound - box.minBound) * 0.5;
for (int i = 0; i < 6; i++)
{
vec4 plane = frustum.planes[i];
// 这段蜜汁代码需要结合记录的博客来看,真的不理解清除,这代码写的简直是顶级防御性编程
vec3 absN = abs(plane.xyz);
float radius = dot(absN, extent); // AABB中心到AABB的所有投影位置的最大距离
float distance = dot(plane.xyz, center) + plane.w; // -plane.w是平面的投影
if (distance < -radius)
return false;
}
return true;
}
|
点光源剔除
点光源的范围是一个球,只需要做一个球和AABB的相交判断
1
2
3
4
5
6
7
8
9
10
11
|
bool SphereIntersectBox(BoundingSphere sphere, BoundingBox box)
{
vec3 closestPoint = clamp(
sphere.center,
box.minBound,
box.maxBound
);
vec3 delta = closestPoint - sphere.center;
float distSq = dot(delta, delta);
return distSq <= sphere.radius * sphere.radius;
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
|
#version 450 core
#include "../common/common.glsl"
#include "../common/constant.glsl"
#include "../common/intersection.glsl"
#ifdef COMPUTE_SHADER
const uint MESH_PASS_TYPE_BASE = 0u;
const uint MESH_PASS_TYPE_DIRECTIONLIGHT_SHADOW = 1u;
const uint MESH_PASS_TYPE_POINTLIGHT_SHADOW = 2u;
#include "../common/gizmo.glsl"
#define LOCAL_X 32 // instance
#define LOCAL_Y 1 // MeshPassType
#define LOCAL_Z 1
layout(set = 1, binding = 0) buffer drawbuffer{
uint instanceCount;
uint passType;
uint _padding[2];
RHIIndirectCommand buffers[MAX_PER_FRAME_INSTANCE_SIZE];
} ALL_CULLING_BUFFERS[4];
layout(local_size_x = LOCAL_X, local_size_y = LOCAL_Y, local_size_z = LOCAL_Z) in;
void main()
{
uint threadInstanceId = gl_GlobalInvocationID.x;
uint passTypeId = gl_GlobalInvocationID.y;
if(threadInstanceId >= ALL_CULLING_BUFFERS[passTypeId].instanceCount){
return;
}
uint instanceId = ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].firstInstance;
mat4 modelMatrix = GetModelMatrix(instanceId);
BoundingBox aabb = GetOriginBoundingBox(instanceId);
aabb = BoundingBoxTransform(aabb,modelMatrix);
// 摄像机剔除 TODO:用前一帧的HIZ进行遮挡剔除?
if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_BASE){
Camera camera = GetCamera();
if(GetRenderSetting().renderBoundingBox == 1){
AddGizmoBoundingBox(aabb, vec4(1,0,0,1));
}
bool isVisiable = FrustumIntersectBox(camera.frustum, aabb);
if(!isVisiable){
ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].instanceCount = 0u;
}
}else if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_DIRECTIONLIGHT_SHADOW){
DirectionLight light = GetDirectionLight();
bool isVisiable = FrustumIntersectBox(light.frustum[0], aabb); // TODO: 现在只考虑一个级联的剔除(导致现在只有CSM=0距离内有阴影),也就是后三个级联的剔除用的第一个视锥,这是错的!!!解决需要想办法把当前是处理第几个级联的信息传递进来~现在架构不够灵活,还不太好传递呢~
if(!isVisiable){
ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].instanceCount = 0u;
}
}else if(ALL_CULLING_BUFFERS[passTypeId].passType == MESH_PASS_TYPE_POINTLIGHT_SHADOW){ // 点光剔除
BoundingSphere sphere = GetPointLight(0).sphere;
bool isVisiable = SphereIntersectBox(sphere, aabb);
if(!isVisiable){
ALL_CULLING_BUFFERS[passTypeId].buffers[threadInstanceId].instanceCount = 0u;
}
}
}
#endif
|
目前的剔除完成了最简单的版本,每个Pass都会进行自己需要的Mesh的剔除,在间接渲染时拿着被修改的IndirectDrawBuffer去渲染
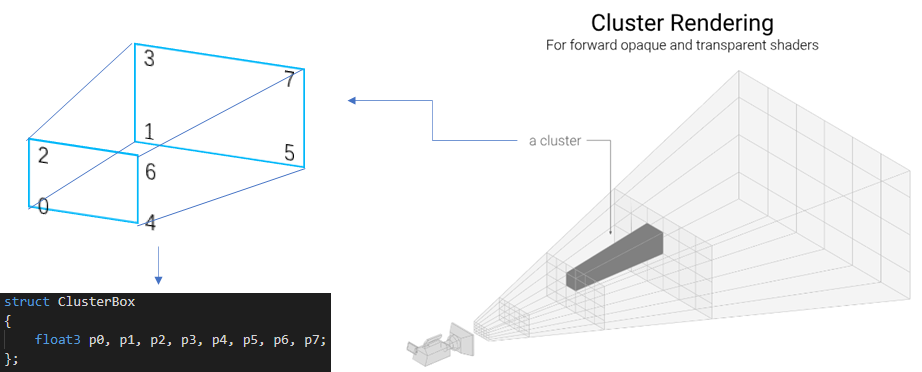
Cluster Based Lighting
把摄像机视锥分簇,每个簇记录会影响它的光源信息,计算光照时,先判断着色点属于哪个簇,只遍历影响它的光源
数据结构
目前灯光存储依靠两个结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
|
// 获取灯光信息的地方
struct LightInfo
{
uint32_t directionLightCount = 0;
uint32_t pointLightCount = 0;
uint32_t spotLightCount = 0;
uint32_t _padding0;
DirectionLight dirLights;
PointLight pointLights[MAX_POINT_LIGHT_SIZE];
SpotLight spotLights[MAX_SPOT_LIGHT_SIZE];
};
// 所有的光源信息统一存储在
layout(set = 0, binding = GLORBAL_RESOURCE_BINDING_LIGHTINFO) readonly buffer LightInfoBuffer {
LightInfo data;
} LIGHTINFO;
LightInfo GetLightInfo()
{
return LIGHTINFO.data;
}
DirectionLight GetDirectionLight()
{
return LIGHTINFO.data.dirLights;
}
PointLight GetPointLight(uint index)
{
return LIGHTINFO.data.pointLights[index];
}
SpotLight GetSpotLight(uint index)
{
return LIGHTINFO.data.spotLights[index];
}
uint GetPointLightCount()
{
return LIGHTINFO.data.pointLightCount;
}
uint GetSpotLightCount()
{
return LIGHTINFO.data.spotLightCount;
}
|
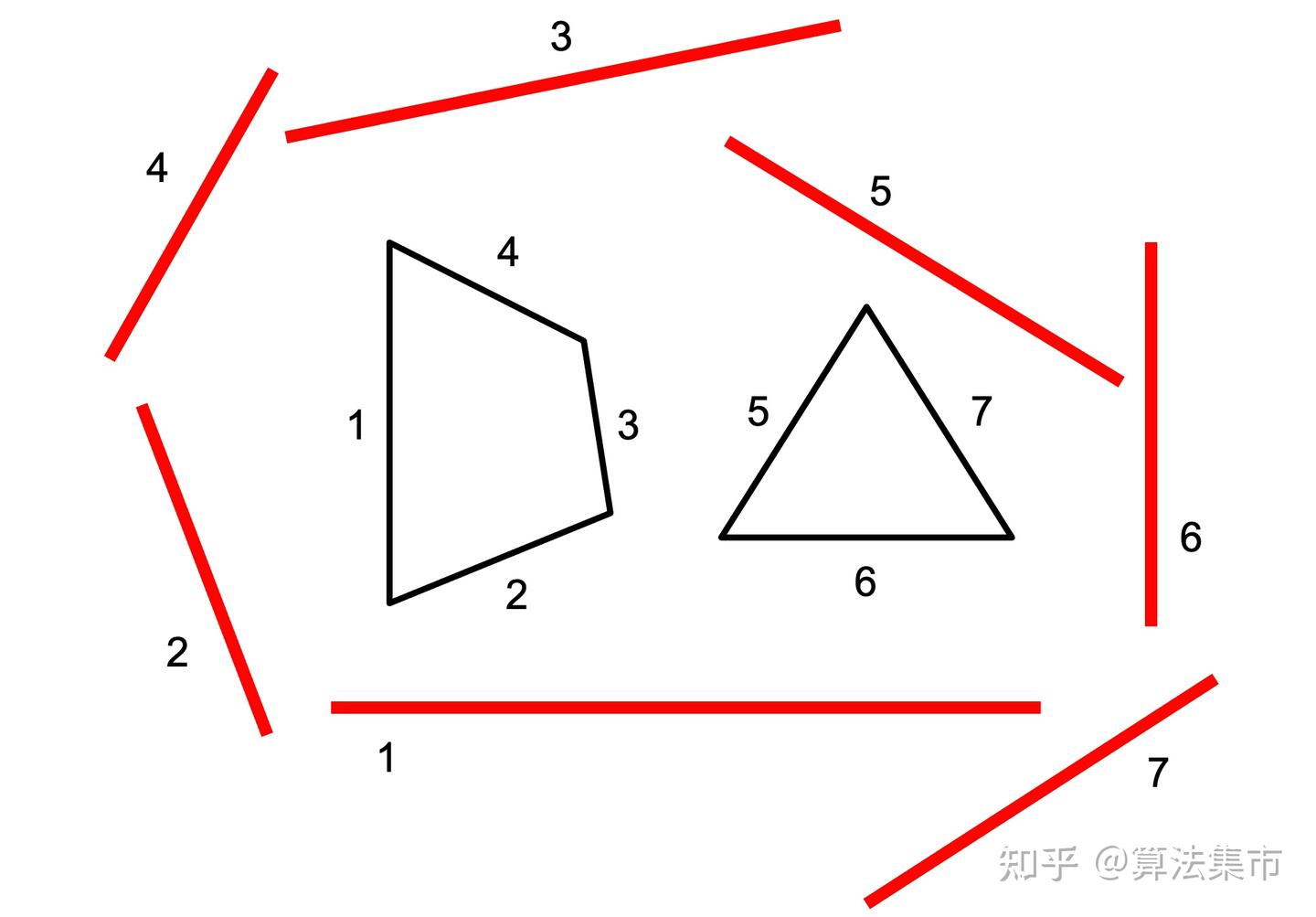
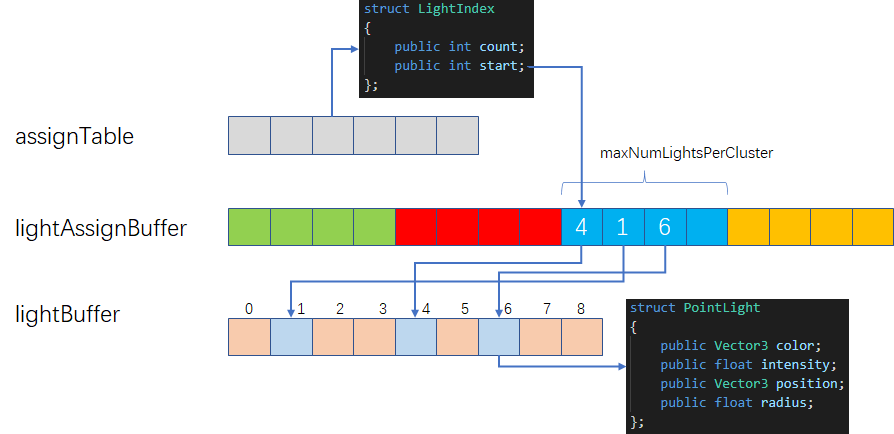
参考下图进行架构簇,每个簇存储起始位置和数量,所有簇的灯光id信息统一存储在lightAssignBuffer中,在簇Buffer中只存储起始索引和数量
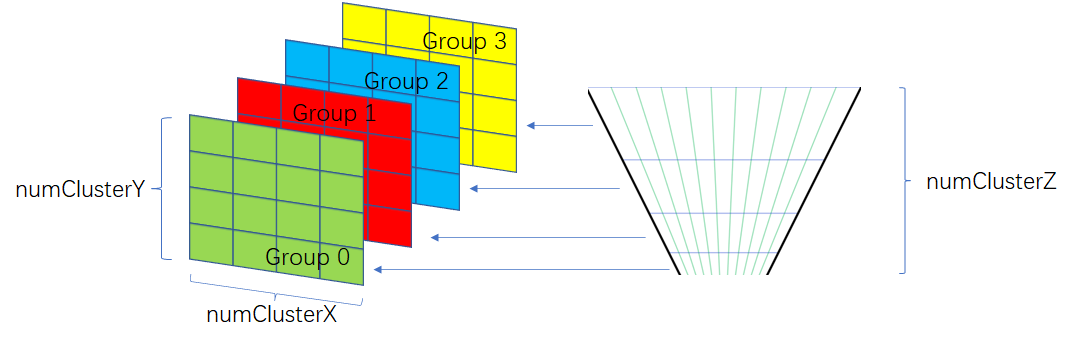
簇的划分
先存Forward方向进行深度划分,可以采样平均切分或者对数切分
在写Shader时疏忽了一个很早之前的知识点,线性深度和非线性深度。
在当前场景下,如果在near-far之间定义深度,是线性深度,但是如果想通过逆变换把屏幕空间坐标转回世界坐标,必须提供非线性深度,但是直接把自己自定义的深度转为非线性后配合当前UV来计算是错的,因为深度与XY的计算是有联系的,自定义深度破坏了这种联系
1
2
|
float minZ = (far - near) / LIGHT_CLUSTER_DEPTH * float(globalID.z) + near;
float maxZ = (far - near) / LIGHT_CLUSTER_DEPTH * float(globalID.z + 1) + near;
|
所以采用射线来定义方向,再用深度来计算最终的世界位置深度
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
/*
传入自定义深度(线性深度[near-far])
*/
vec3 SceenToWorldCustomDepth(vec2 uv, float viewZ, Camera camera)
{
vec2 ndcXY = uv * 2.0 - 1.0;
vec4 ndcPos = vec4(ndcXY, 0.0, 1.0);
vec4 viewPos = camera.invProj * ndcPos;
viewPos /= viewPos.w;
vec3 viewDir = normalize(viewPos.xyz);
float t = viewZ / (-viewDir.z);
vec3 finalViewPos = viewDir * t;
vec4 worldPos = camera.invView * vec4(finalViewPos, 1.0);
return worldPos.xyz;
}
|
哎这种写起来太麻烦,重新看了一眼博客,它的做法是直接拿near和Far进行映射,然后再切分,也就是转为世界坐标的点都在Near和Far上,然后调整按比例调整
最终版本,还捎带实现了多摄像机系统,为了方便调试
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
|
#version 450 core
#include "../common/common.glsl"
#include "../common/constant.glsl"
#include "../common/intersection.glsl"
#include "../common/math.glsl"
#include "../common/gizmo.glsl"
#ifdef COMPUTE_SHADER
layout(set = 1, binding = 0, rg32ui) uniform uimage2DArray u_Clusters; // FORMAT_R32G32_UINT
layout(set = 1, binding = 1) buffer lightIDs{
uint lightID[];
}u_lightIDs;
#define THREAD_SIZE_X 8
#define THREAD_SIZE_Y 8
#define THREAD_SIZE_Z 1
layout (local_size_x = THREAD_SIZE_X,
local_size_y = THREAD_SIZE_Y,
local_size_z = THREAD_SIZE_Z) in;
void main()
{
uvec3 globalID = gl_GlobalInvocationID;
Camera camera;
if(GetRenderSetting().ClusterLightFrustum == 1){
camera = GetDefaultCamera();
}else{
camera = GetCamera();
}
camera.InverseViewProj = inverse(camera.projNoJetter * camera.view); // 后续都用的projNoJetter
float w = camera.width;
float h = camera.height;
uint clusterX = uint((w + LIGHT_CLUSTER_GRID_SIZE - 1) / LIGHT_CLUSTER_GRID_SIZE);
uint clusterY = uint((h + LIGHT_CLUSTER_GRID_SIZE - 1) / LIGHT_CLUSTER_GRID_SIZE);
uint clusterZ = LIGHT_CLUSTER_DEPTH;
uint clusterCount = clusterX * clusterY * clusterZ;
if (globalID.x >= clusterX || globalID.y >= clusterY || globalID.z >= clusterZ) {
return;
}
//////////////////////////////////////// 计算每个簇的世界坐标(先计算NDC坐标下8个顶点位置,转到世界空间即可) ///////////////////////////////////////////
float ndcMinx = float(globalID.x) / float(clusterX);
float ndcMiny = float(globalID.y) / float(clusterY);
float ndcMaxx = (float(globalID.x) + 1) / float(clusterX);
float ndcMaxy = (float(globalID.y) + 1) / float(clusterY);
// 线性划分
float minZ = float(globalID.z) / float(clusterZ);
float maxZ = float((globalID.z + 1)) / float(clusterZ);
// 一长条的簇
vec3 p0 = SceenToWorld(vec2(ndcMinx, ndcMiny), 0, camera);
vec3 p1 = SceenToWorld(vec2(ndcMinx, ndcMiny), 1, camera);
vec3 p2 = SceenToWorld(vec2(ndcMinx, ndcMaxy), 0, camera);
vec3 p3 = SceenToWorld(vec2(ndcMinx, ndcMaxy), 1, camera);
vec3 p4 = SceenToWorld(vec2(ndcMaxx, ndcMiny), 0, camera);
vec3 p5 = SceenToWorld(vec2(ndcMaxx, ndcMiny), 1, camera);
vec3 p6 = SceenToWorld(vec2(ndcMaxx, ndcMaxy), 0, camera);
vec3 p7 = SceenToWorld(vec2(ndcMaxx, ndcMaxy), 1, camera);
// 在World下切分深度
vec3 clusterP0 = p0 + minZ * (p1-p0);
vec3 clusterP1 = p0 + maxZ * (p1-p0);
vec3 clusterP2 = p2 + minZ * (p3-p2);
vec3 clusterP3 = p2 + maxZ * (p3-p2);
vec3 clusterP4 = p4 + minZ * (p5-p4);
vec3 clusterP5 = p4 + maxZ * (p5-p4);
vec3 clusterP6 = p6 + minZ * (p7-p6);
vec3 clusterP7 = p6 + maxZ * (p7-p6);
vec3 clusterCenter = (clusterP0 + clusterP1 + clusterP2 + clusterP3 + clusterP4 + clusterP5 + clusterP6 + clusterP7) / 8;
// 构建视锥
Frustum frustum;
frustum.planes[0] = calculatePlane(clusterP0, clusterP2,clusterP4, clusterCenter); // 近平面
frustum.planes[1] = calculatePlane(clusterP5, clusterP7, clusterP1, clusterCenter); // 远平面
frustum.planes[2] = calculatePlane(clusterP0, clusterP1, clusterP2, clusterCenter); // 左平面
frustum.planes[3] = calculatePlane(clusterP4, clusterP6,clusterP5, clusterCenter); // 右平面
frustum.planes[4] = calculatePlane(clusterP0, clusterP4, clusterP5, clusterCenter); // 下平面
frustum.planes[5] = calculatePlane(clusterP2, clusterP3, clusterP6, clusterCenter); // 上平面
//////////////////////////////////////// 相加测试与记录数据 ///////////////////////////////////////////
uint lightIDs[MAX_LIGHTS_PER_CLUSTER];
uint lightCount = 0;
for(int i = 0; i < GetPointLightCount(); i++){
BoundingSphere sphere = GetPointLight(i).sphere;
bool isVisiable = FrustumIntersectSphere(frustum, sphere);
if(isVisiable){
lightIDs[lightCount++] = i;
if(GetRenderSetting().ClusterLightFrustum == 1){ // debug受影响的视锥
DrawFrustumEdges(clusterP0, clusterP2,clusterP6, clusterP4, clusterP1, clusterP3, clusterP7, clusterP5, vec4(1, 0, 0, 1.0));
}
}
}
// 记录数据
uint startOffset = atomicAdd(LIGHTINFO.data.clusterAtomicOffset,lightCount); // 它返回的是操作前的数据
for(uint i = 0; i < lightCount; i++){
u_lightIDs.lightID[startOffset + i] = lightIDs[i];
}
imageStore(u_Clusters, ivec3(globalID), uvec4(uvec2(lightCount, startOffset), 0, 0));
}
#endif
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
ivec3 GetClusterIndex(vec3 worldPos,Camera camera)
{
vec3 viewPos = (camera.view * vec4(worldPos, 1.0)).xyz;
float zView = -viewPos.z;
if (zView <= camera.Near)
zView = camera.Near;
if (zView >= camera.Far)
zView = camera.Far;
vec4 clipPos = camera.proj * vec4(viewPos, 1.0);
vec3 ndcPos = clipPos.xyz / clipPos.w; // [-1, 1]
vec2 screenUV = ndcPos.xy * 0.5 + 0.5; // [0, 1]
vec2 pixelPos = screenUV * vec2(camera.width, camera.height);
uint clusterX = uint((camera.width + LIGHT_CLUSTER_GRID_SIZE - 1)
/ LIGHT_CLUSTER_GRID_SIZE);
uint clusterY = uint((camera.height + LIGHT_CLUSTER_GRID_SIZE - 1)
/ LIGHT_CLUSTER_GRID_SIZE);
uint clusterZ = LIGHT_CLUSTER_DEPTH;
uint x = uint(pixelPos.x / LIGHT_CLUSTER_GRID_SIZE);
uint y = uint(pixelPos.y / LIGHT_CLUSTER_GRID_SIZE);
x = clamp(x, 0u, clusterX - 1);
y = clamp(y, 0u, clusterY - 1);
float zNorm = (zView - camera.Near) / (camera.Far - camera.Near);
uint z = uint(zNorm * float(clusterZ));
z = clamp(z, 0u, clusterZ - 1);
return ivec3(x, y, z);
}
|
这张图展示了Mesh剔除和灯光分簇