1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
|
def load_motion_data(bvh_file_path):
"""part2 辅助函数,读取bvh文件"""
with open(bvh_file_path, 'r') as f:
lines = f.readlines()
for i in range(len(lines)):
if lines[i].startswith('Frame Time'):
break
motion_data = []
for line in lines[i + 1:]:
data = [float(x) for x in line.split()]
if len(data) == 0:
break
motion_data.append(np.array(data).reshape(1, -1))
motion_data = np.concatenate(motion_data, axis=0)
return motion_data
def rotation_matrix(a, b):
a = a / np.linalg.norm(a)
b = b / np.linalg.norm(b)
n = np.cross(a, b)
# 旋转矩阵是正交矩阵,矩阵的每一行每一列的模,都为1;并且任意两个列向量或者任意两个行向量都是正交的。
# n=n/np.linalg.norm(n)
# 计算夹角
cos_theta = np.dot(a, b)
sin_theta = np.linalg.norm(n)
theta = np.arctan2(sin_theta, cos_theta)
# 构造旋转矩阵
c = np.cos(theta)
s = np.sin(theta)
v = 1 - c
rotation_matrix = np.array([[n[0] * n[0] * v + c, n[0] * n[1] * v - n[2] * s, n[0] * n[2] * v + n[1] * s],
[n[0] * n[1] * v + n[2] * s, n[1] * n[1] * v + c, n[1] * n[2] * v - n[0] * s],
[n[0] * n[2] * v - n[1] * s, n[1] * n[2] * v + n[0] * s, n[2] * n[2] * v + c]])
return rotation_matrix
def inv_safe(data):
# return R.from_quat(data).inv()
if np.allclose(data, [0, 0, 0, 0]):
return np.eye(3)
else:
return np.linalg.inv(R.from_quat(data).as_matrix())
def from_quat_safe(data):
# return R.from_quat(data)
if np.allclose(data, [0, 0, 0, 0]):
return np.eye(3)
else:
return R.from_quat(data).as_matrix()
def part1_inverse_kinematics(meta_data, joint_positions, joint_orientations, target_pose):
"""
完成函数,计算逆运动学
输入:
meta_data: 为了方便,将一些固定信息进行了打包,见上面的meta_data类
joint_positions: 当前的关节位置,是一个numpy数组,shape为(M, 3),M为关节数
joint_orientations: 当前的关节朝向,是一个numpy数组,shape为(M, 4),M为关节数
target_pose: 目标位置,是一个numpy数组,shape为(3,)
输出:
经过IK后的姿态
joint_positions: 计算得到的关节位置,是一个numpy数组,shape为(M, 3),M为关节数
joint_orientations: 计算得到的关节朝向,是一个numpy数组,shape为(M, 4),M为关节数
"""
path, path_name, path1, path2 = meta_data.get_path_from_root_to_end()
parent_idx = meta_data.joint_parent
# local_rotation是用于最后计算不在链上的节点
no_caled_orientation = copy.deepcopy(joint_orientations)
local_rotation = [
R.from_matrix(inv_safe(joint_orientations[parent_idx[i]]) * from_quat_safe(joint_orientations[i])).as_quat() for
i
in range(len(joint_orientations))]
local_rotation[0] = R.from_matrix(from_quat_safe(joint_orientations[0])).as_quat()
local_position = [joint_positions[i] - joint_positions[parent_idx[i]] for i
in range(len(joint_orientations))]
local_position[0] = joint_positions[0]
path_end_id = path1[0] ## lWrist_end 就是手掌 只是加了end不叫hand而已
for k in range(0, 300):
# k:循环次数
# 正向的,path1是从手到root之前
for idx in range(0, len(path1)):
# idx:路径上的第几个节点了,第0个是手,最后一个是root
path_joint_id = path1[idx]
vec_to_end = joint_positions[path_end_id] - joint_positions[path_joint_id]
vec_to_target = target_pose - joint_positions[path_joint_id]
# 获取end->target的旋转矩阵
# debug
# rot_matrix=rotation_matrix(np.array([1,0,0]),np.array([1,1,0]))
rot_matrix = rotation_matrix(vec_to_end, vec_to_target)
# 计算前的朝向。这个朝向实际上是累乘到父节点的
initial_orientation = from_quat_safe(joint_orientations[path_joint_id])
# 旋转矩阵,格式换算
rot_matrix_R = R.from_matrix(rot_matrix).as_matrix()
# 计算后的朝向
calculated_orientation = rot_matrix_R.dot(initial_orientation)
# 写回结果列表
joint_orientations[path_joint_id] = R.from_matrix(calculated_orientation).as_quat()
# 子节点的朝向也会有所变化
# idx-1 就是当前节点的下一个更接近尾端的节点,一直向前迭代到1
for i in range(idx - 1, 0, -1):
path_joint_id = path1[i]
# 遍历路径后的节点,都乘上旋转
joint_orientations[path_joint_id] = R.from_matrix(
rot_matrix_R.dot(from_quat_safe(joint_orientations[path_joint_id]))).as_quat()
path_joint_id = path1[idx]
# 修改子节点的位置
for i in range(idx - 1, -1, -1):
# path_joint_id=path1[i]
# 节点id
next_joint_id = path1[i]
# 指向下个节点的向量
vec_to_next = joint_positions[next_joint_id] - joint_positions[path_joint_id]
# 左乘,改变向量
calculated_vec_to_next_dir = rot_matrix.dot(vec_to_next)
# 防止长度不对
calculated_vec_to_next = calculated_vec_to_next_dir / np.linalg.norm(
calculated_vec_to_next_dir) * np.linalg.norm(vec_to_next)
# 还原回去
joint_positions[next_joint_id] = calculated_vec_to_next + joint_positions[path_joint_id]
# path2是从脚到root,所以要倒着
# debug
# for idx in range(len(path2)-1,len(path2)-3,-1): # len(path2)-1 --> 0
for idx in range(len(path2) - 1, 0, -1): # len(path2)-1 --> 0
path_joint_id = path2[idx]
parient_joint_id = max(parent_idx[path_joint_id], 0)
vec_to_end = joint_positions[path_end_id] - joint_positions[path_joint_id]
vec_to_target = target_pose - joint_positions[path_joint_id]
# 获取end->target的旋转矩阵
# debug
# rot_matrix=rotation_matrix(np.array([0.72,0.35,0]),np.array([0.5,0.35,0]))
# rot_matrix=np.linalg.inv(rot_matrix)
rot_matrix = rotation_matrix(vec_to_end, vec_to_target)
# 计算前的朝向。注意path2是反方向的,要改父节点才行
initial_orientation = from_quat_safe(joint_orientations[path_joint_id])
# 旋转矩阵,格式换算
rot_matrix_R = R.from_matrix(rot_matrix).as_matrix()
# 计算后的朝向
calculated_orientation = rot_matrix_R.dot(initial_orientation)
# 写回结果列表
joint_orientations[path_joint_id] = R.from_matrix(calculated_orientation).as_quat()
# 其他节点的朝向也会有所变化
for i in range(idx + 1, len(path2)):
path_joint_id = path2[i]
joint_orientations[path_joint_id] = R.from_matrix(
rot_matrix_R.dot(from_quat_safe(joint_orientations[path_joint_id]))).as_quat()
# idx-1 就是当前节点的下一个更接近尾端的节点,一直向前迭代到1
for i in range(len(path1) - 1, 0, -1):
path_joint_id = path1[i]
# 遍历路径后的节点,都乘上旋转
joint_orientations[path_joint_id] = R.from_matrix(
rot_matrix_R.dot(from_quat_safe(joint_orientations[path_joint_id]))).as_quat()
path_joint_id = path2[max(idx - 1, 0)]
# 修改父节点,或者说更靠近手的那些节点的位置
# path2上的
for i in range(idx, len(path2)):
# path_joint_id=path1[i]
# 节点id
prev_joint_id = path2[i]
# 指向上一个节点的向量
vec_to_next = joint_positions[prev_joint_id] - joint_positions[path_joint_id]
# 左乘,改变向量
calculated_vec_to_next_dir = rot_matrix.dot(vec_to_next)
# 防止长度不对
calculated_vec_to_next = calculated_vec_to_next_dir / np.linalg.norm(
calculated_vec_to_next_dir) * np.linalg.norm(vec_to_next)
# 还原回去
joint_positions[prev_joint_id] = joint_positions[path_joint_id] + calculated_vec_to_next
# path1上的
for i in range(len(path1) - 1, -1, -1):
# path_joint_id=path1[i]
# 节点id
prev_joint_id = path1[i]
# 指向上一个节点的向量
vec_to_next = joint_positions[prev_joint_id] - joint_positions[path_joint_id]
# 左乘,改变向量
calculated_vec_to_next_dir = rot_matrix.dot(vec_to_next)
# 防止长度不对
calculated_vec_to_next = calculated_vec_to_next_dir / np.linalg.norm(
calculated_vec_to_next_dir) * np.linalg.norm(vec_to_next)
# 还原回去
joint_positions[prev_joint_id] = calculated_vec_to_next + joint_positions[path_joint_id]
# debug
# rot_matrix=rotation_matrix(np.array([1,0,0]),np.array([1,0,1]))
# joint_orientations[0]=R.from_matrix(rot_matrix).as_quat()
# joint_orientations[1]=R.from_matrix(rot_matrix).as_quat()
joint_orientations[path_end_id] = joint_orientations[path1[1]]
cur_dis = np.linalg.norm(joint_positions[path_end_id] - target_pose)
if cur_dis < 0.01:
break
print("距离", cur_dis, "迭代了", k, "次")
# 更新不在链上的节点
for k in range(len(joint_orientations)):
if k in path:
pass
elif k == 0:
# 要单独处理,不然跟节点的-1就会变成从最后一个节点开始算
pass
else:
# 先获取局部旋转
# 这里如果直接存的就是矩阵就会有问题?
local_rot_matrix = R.from_quat(local_rotation[k]).as_matrix()
# 再获取我们已经计算了的父节点的旋转
parent_rot_matrix = from_quat_safe(joint_orientations[parent_idx[k]])
# 乘起来
# re=local_rot_matrix.dot(parent_rot_matrix)
re = parent_rot_matrix.dot(local_rot_matrix)
joint_orientations[k] = R.from_matrix(re).as_quat()
# 父节点没旋转的时候是:
initial_o = from_quat_safe(no_caled_orientation[parent_idx[k]])
# 父节点的旋转*delta_orientation=子节点旋转
# 反求delta_orientation
delta_orientation = np.dot(re, np.linalg.inv(initial_o))
# 父节点的位置加原本基础上的旋转
joint_positions[k] = joint_positions[parent_idx[k]] + delta_orientation.dot(local_position[k])
return joint_positions, joint_orientations
|
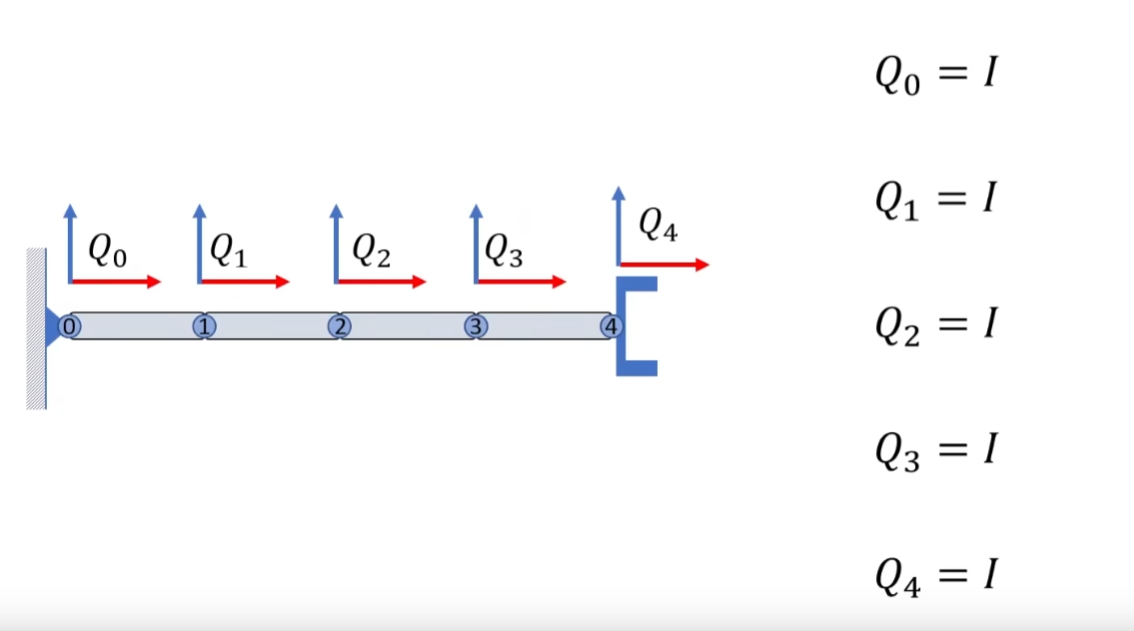
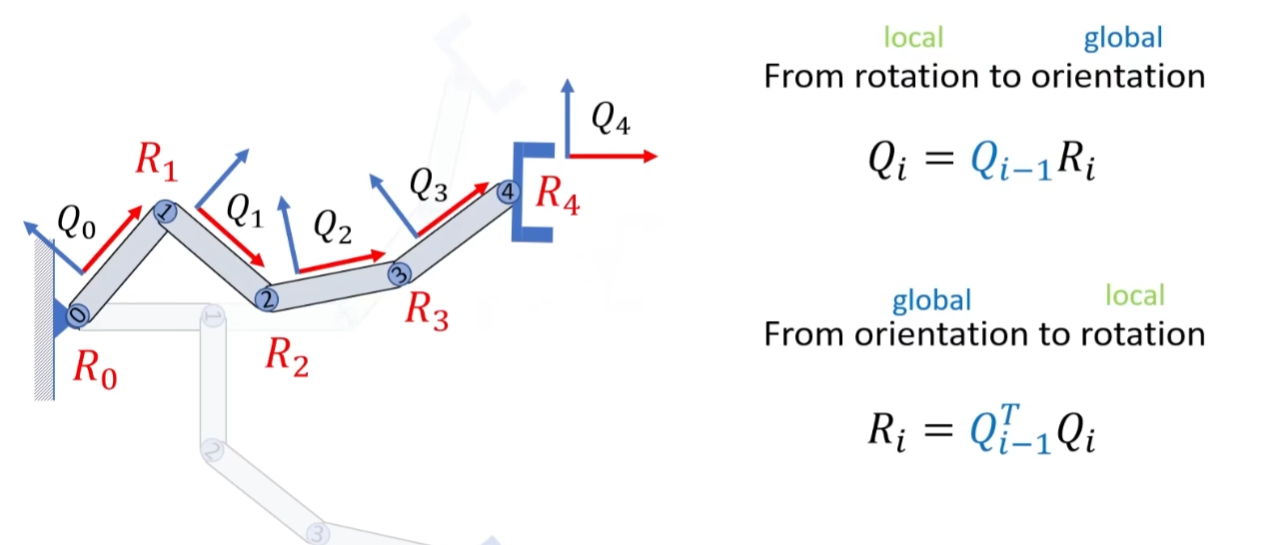
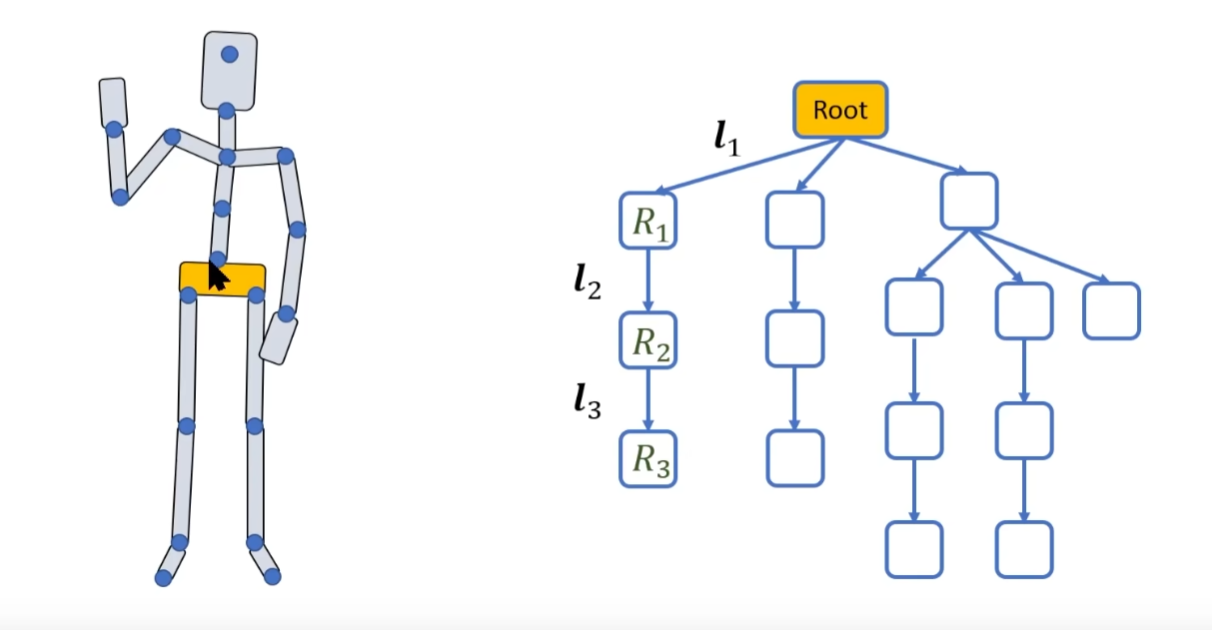
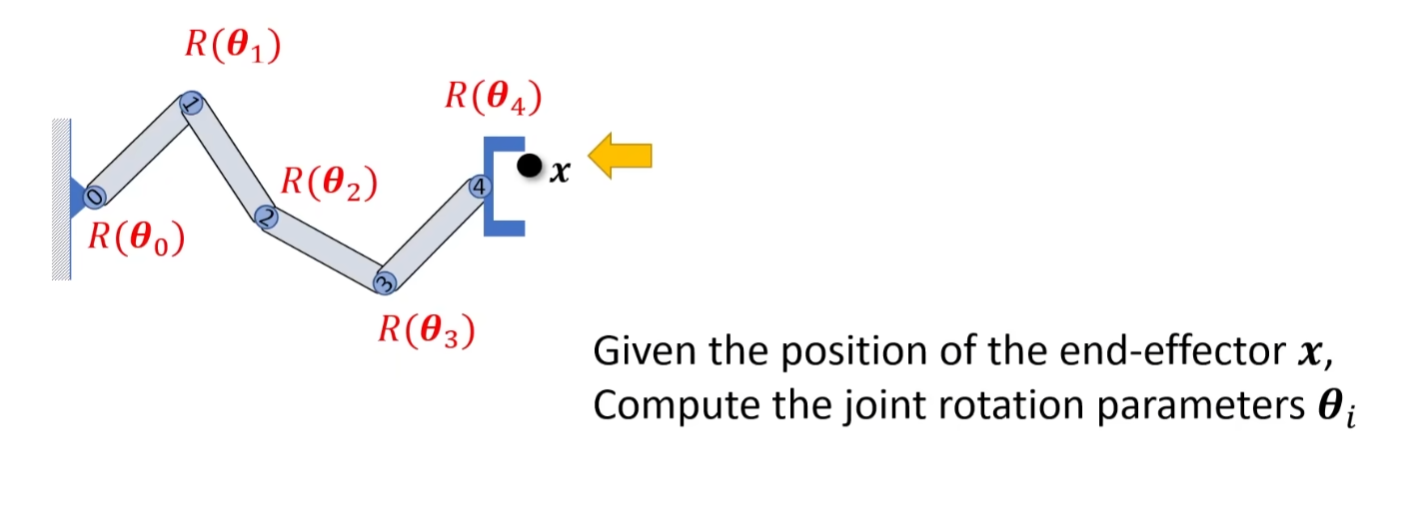
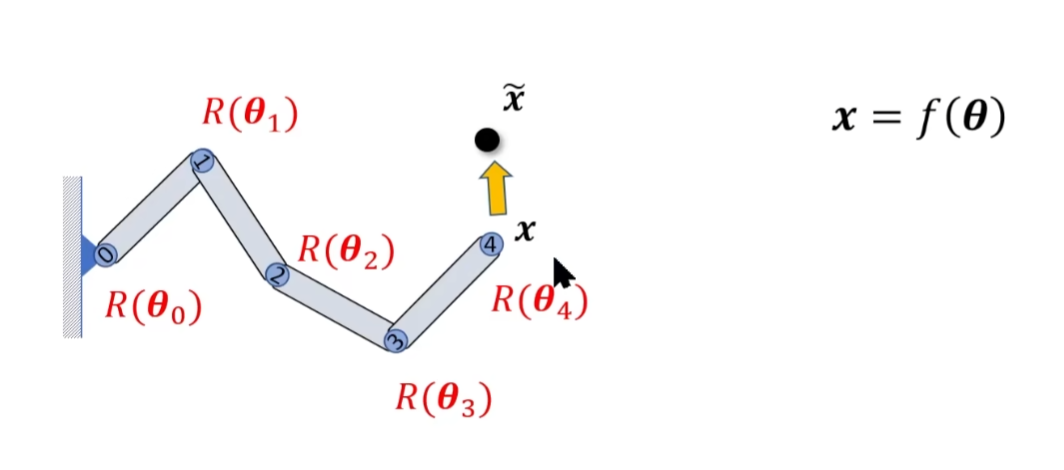
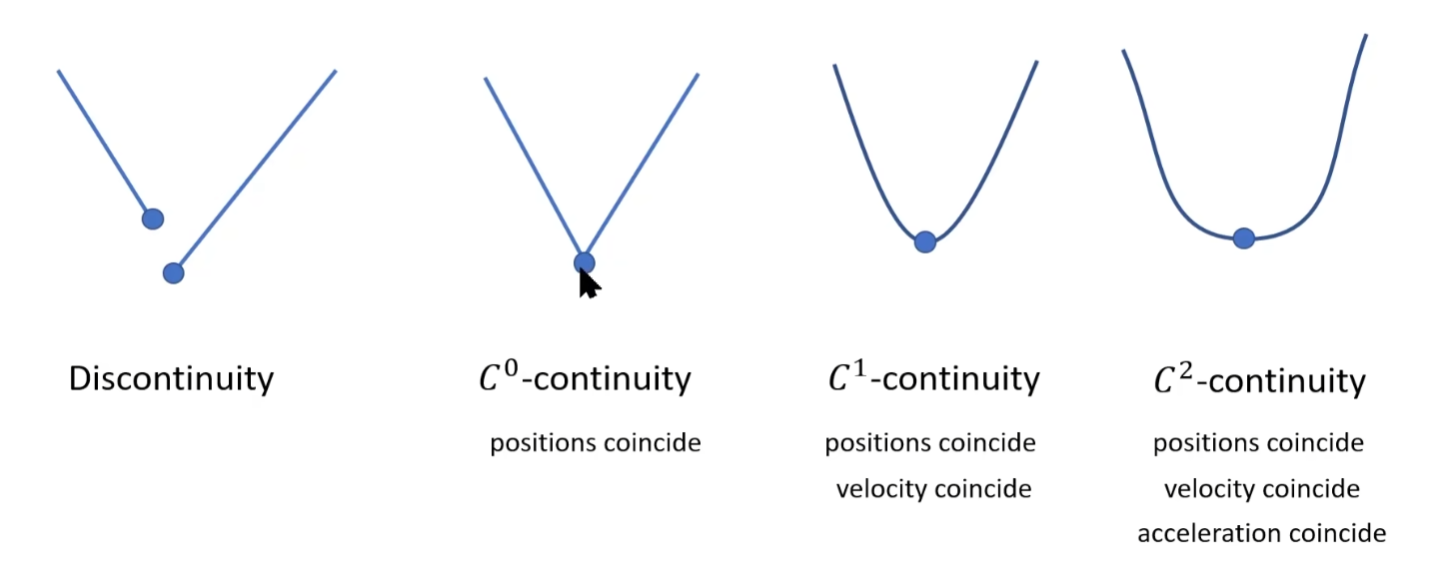
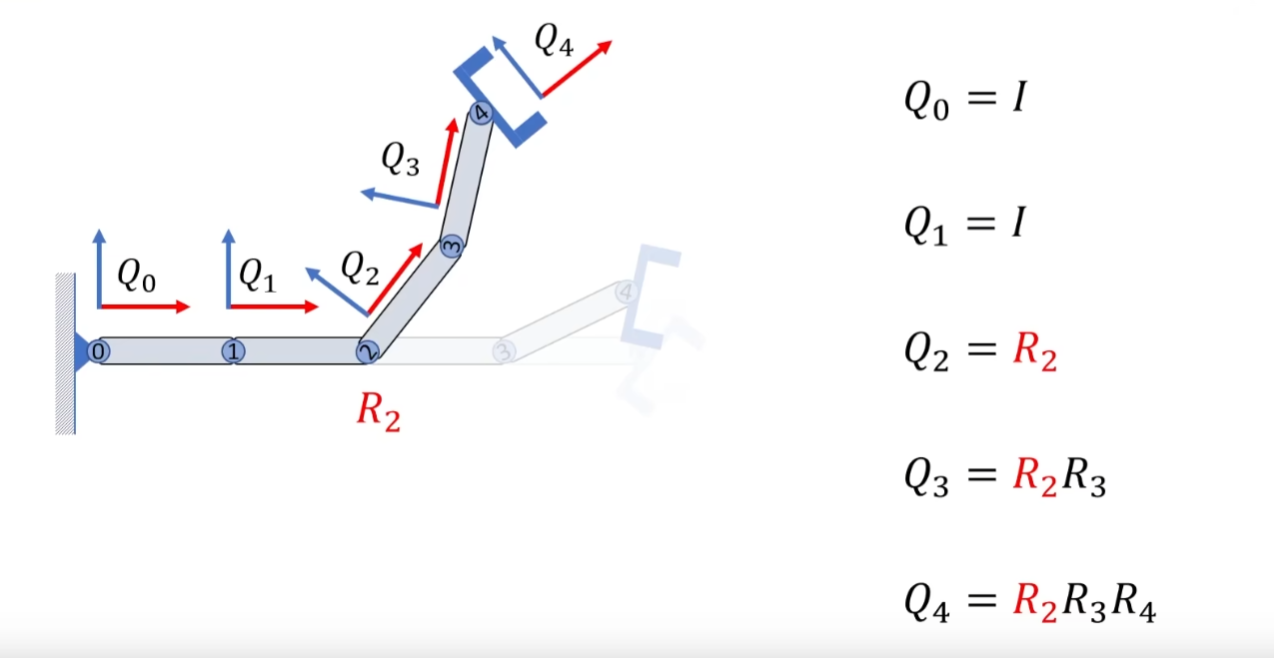 子关节的朝向就是夫关节朝向乘以自身的旋转
子关节的朝向就是夫关节朝向乘以自身的旋转
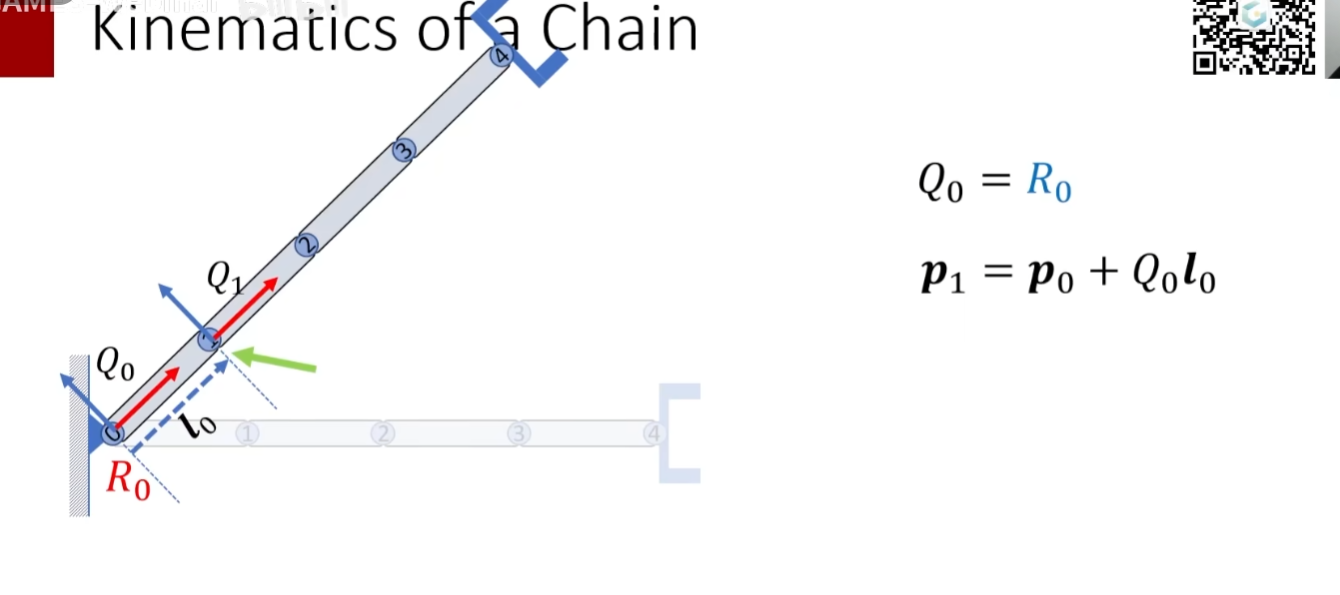
 只旋转R0时,Q1在Q0的局部坐标系下的坐标并不会变一直是l0,如果想求Q1的世界坐标,就是父关节的世界坐标加朝向*l0
只旋转R0时,Q1在Q0的局部坐标系下的坐标并不会变一直是l0,如果想求Q1的世界坐标,就是父关节的世界坐标加朝向*l0
 这一套东西就是用传播来更新,比如Q4的局部坐标系的某一个点,可以算出他在Q3的局部坐标系的位置,Q3的位置又能计算出他在Q2的位置,最终得到这个点在Q0的位置,最终再换算到世界坐标系,就得到了Q4局部坐标系下某一点在全局坐标系下的位置
这块比较好理解
这一套东西就是用传播来更新,比如Q4的局部坐标系的某一个点,可以算出他在Q3的局部坐标系的位置,Q3的位置又能计算出他在Q2的位置,最终得到这个点在Q0的位置,最终再换算到世界坐标系,就得到了Q4局部坐标系下某一点在全局坐标系下的位置
这块比较好理解
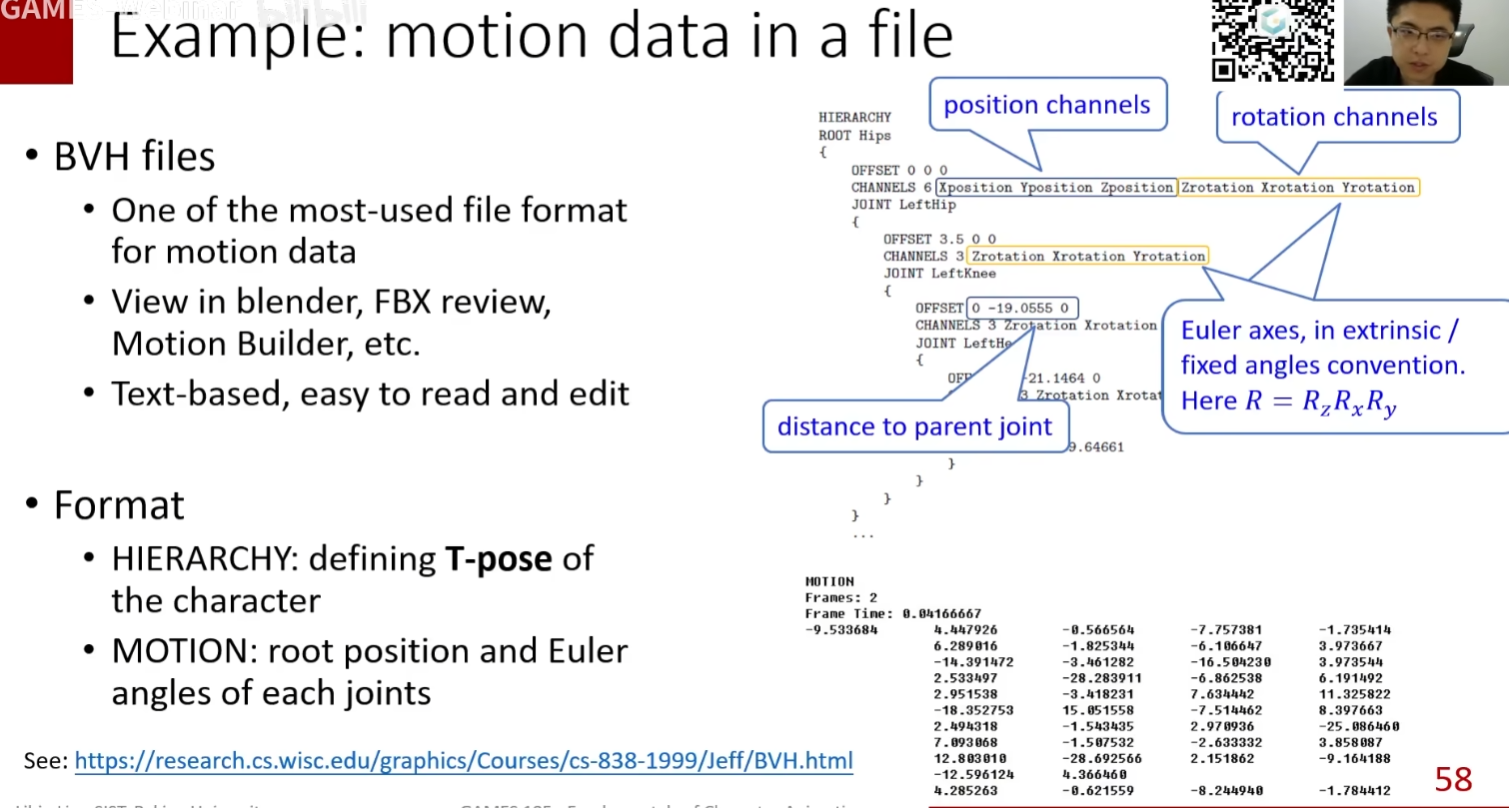
 BVH文件,用欧拉角表示旋转
BVH文件,用欧拉角表示旋转
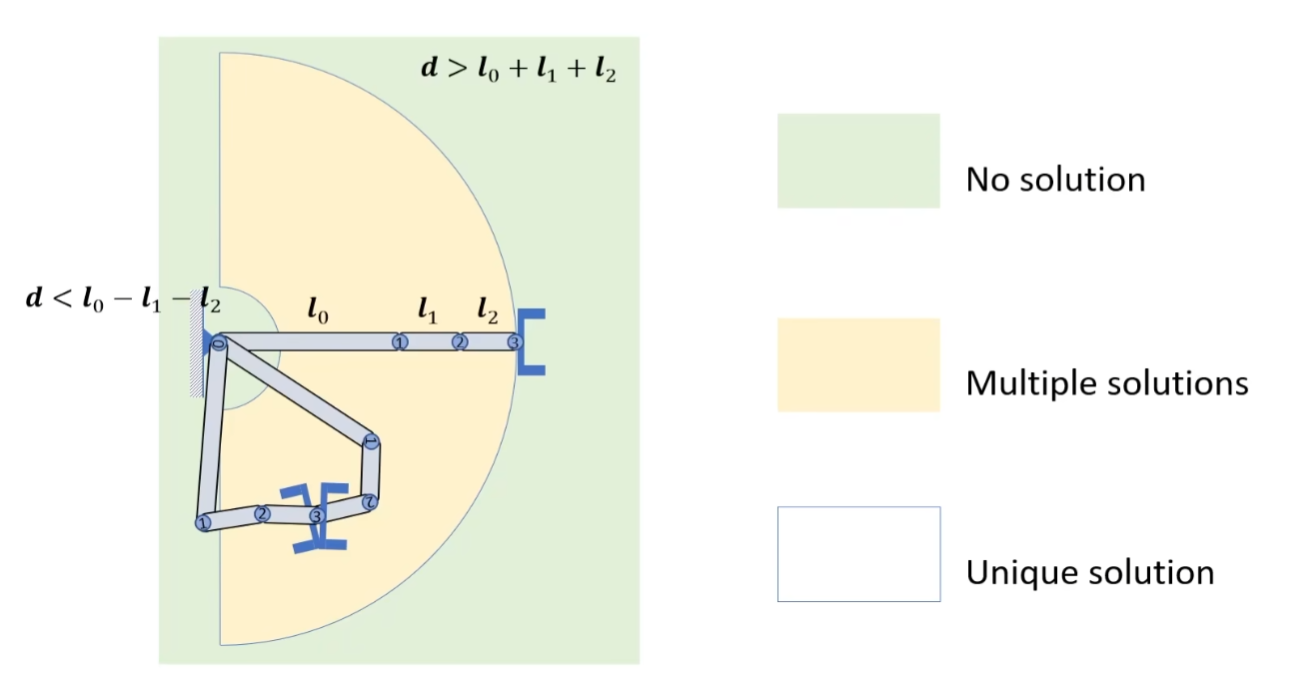
 IK问题可以有解、无解、多解
IK问题可以有解、无解、多解
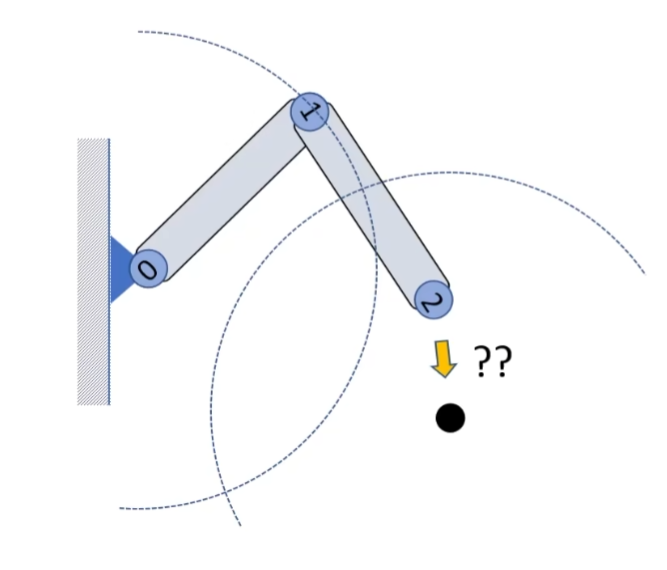
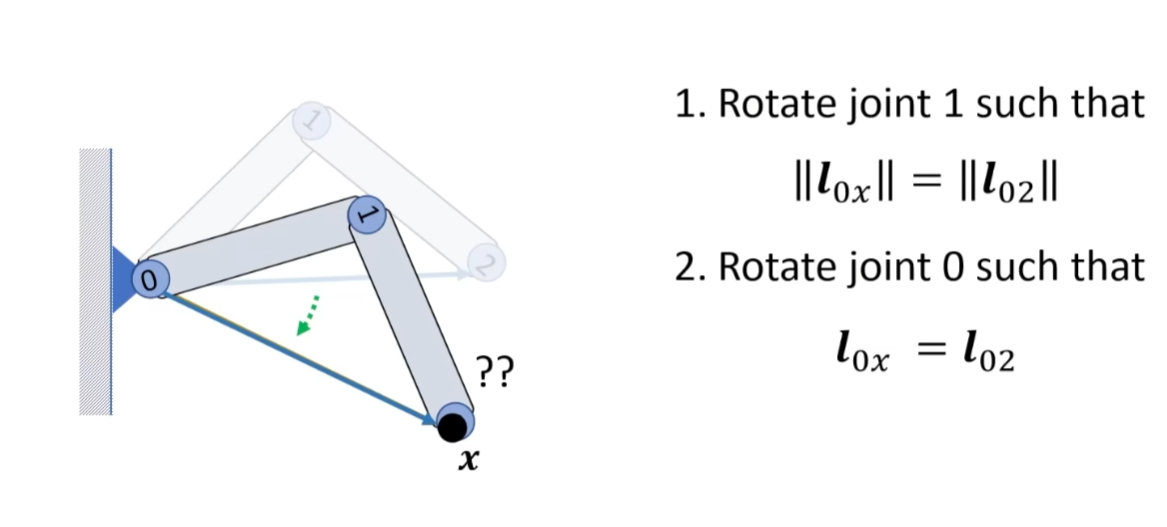
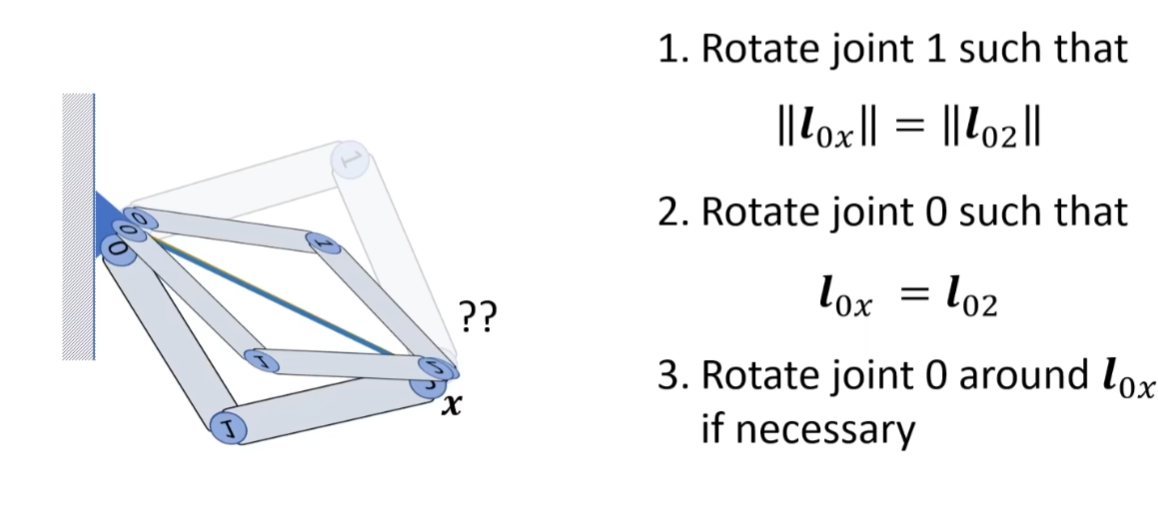
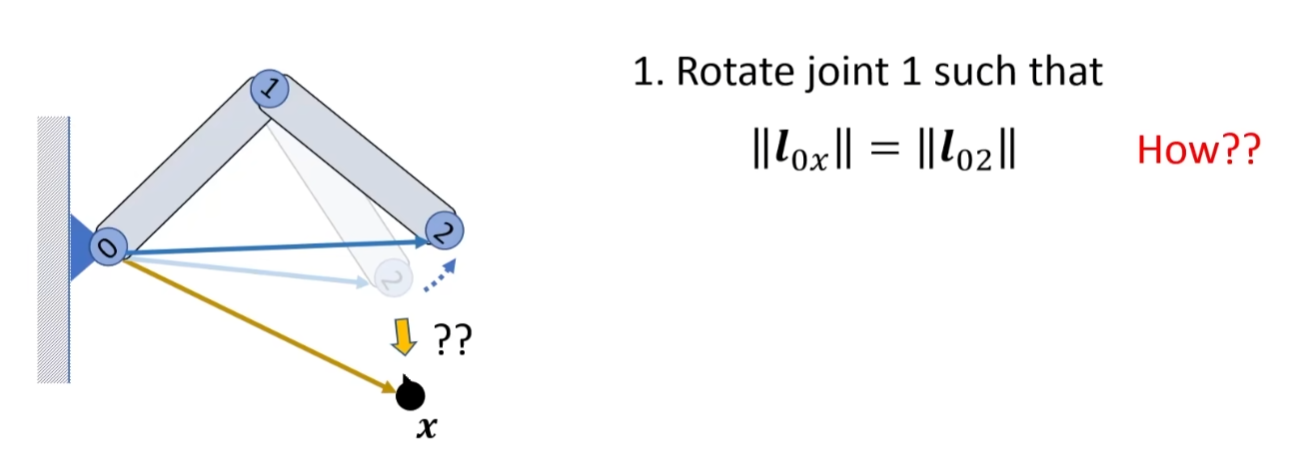 再旋转关节0即可
再旋转关节0即可
 在三维下绕着0x为轴旋转即可
在三维下绕着0x为轴旋转即可
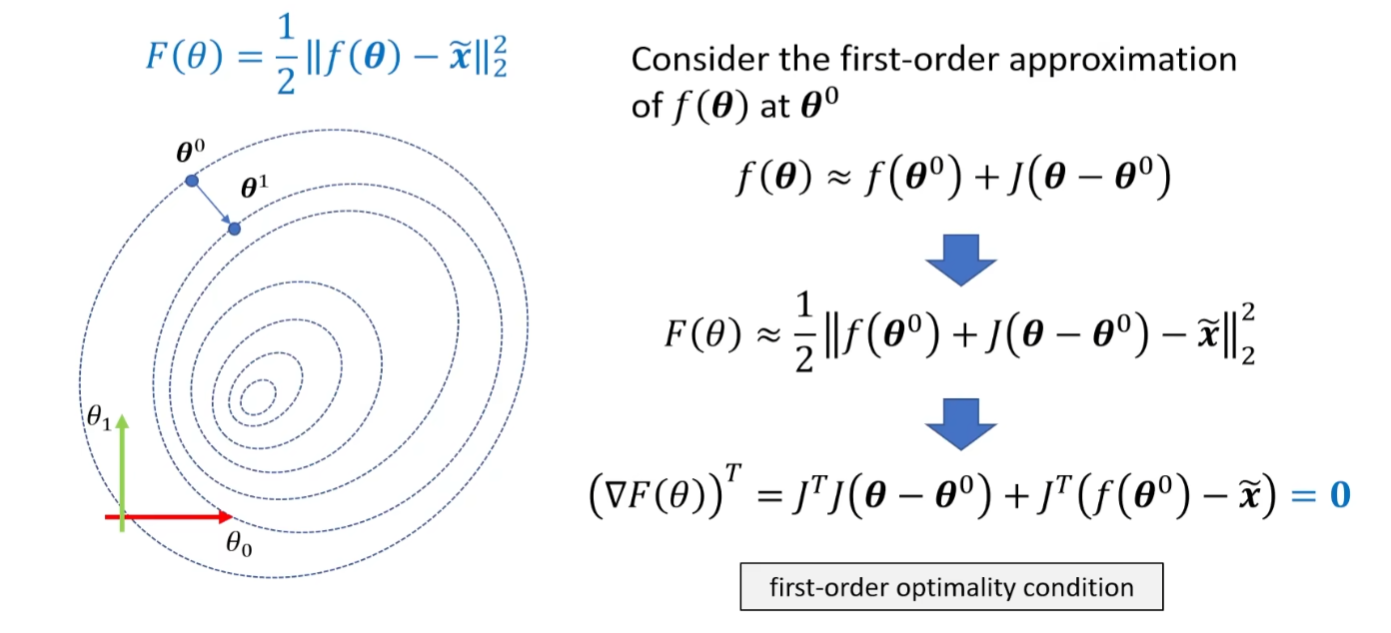
 求解问题就是:就是找到各关节的旋转使得目标点位置-公式求解的末端点位置=0
这个方程有没有根
求解问题就是:就是找到各关节的旋转使得目标点位置-公式求解的末端点位置=0
这个方程有没有根 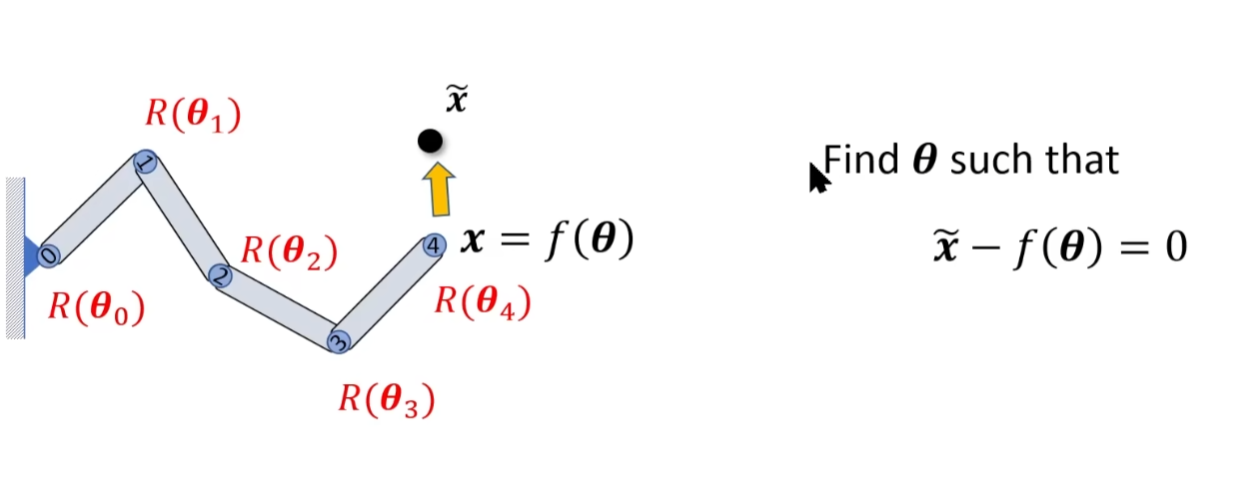 等价的可以转化为一个优化问题,优化问题取极值
等价的可以转化为一个优化问题,优化问题取极值
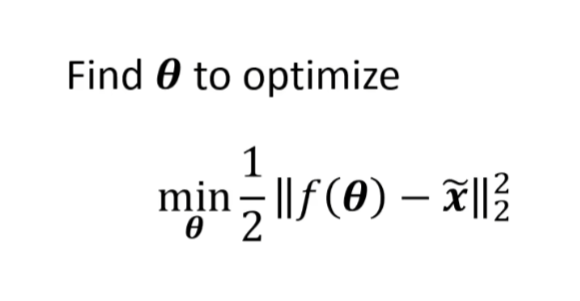
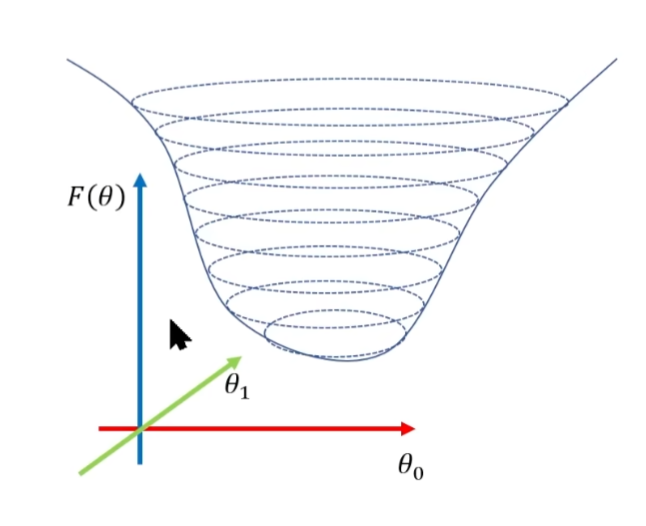 求解问题到这里就变成了函数求极值的问题
求解问题到这里就变成了函数求极值的问题
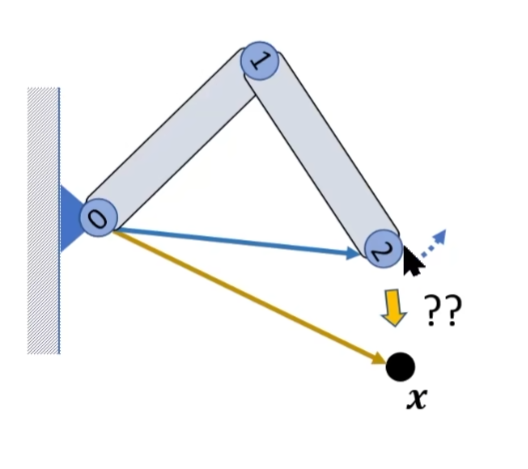
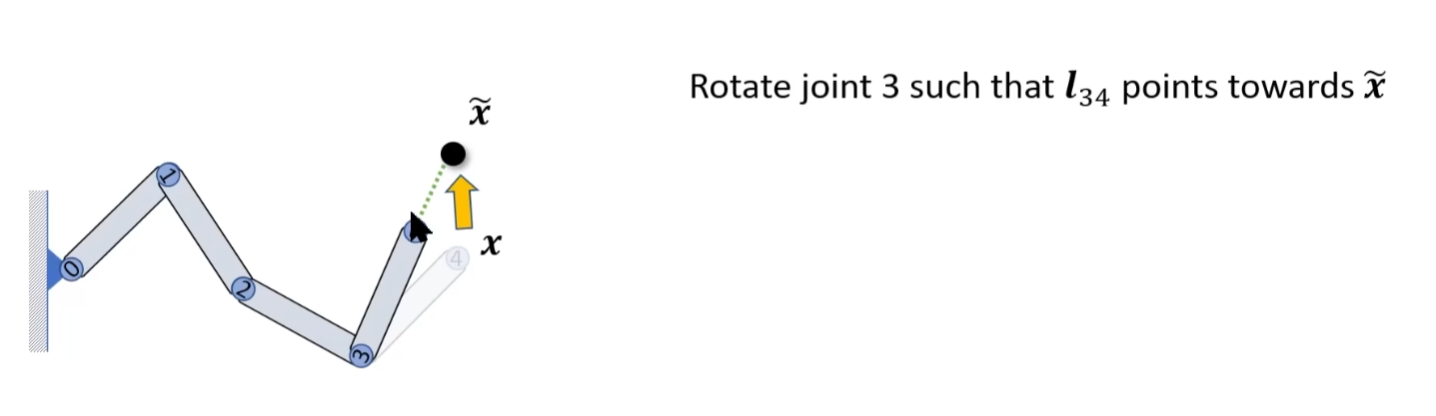
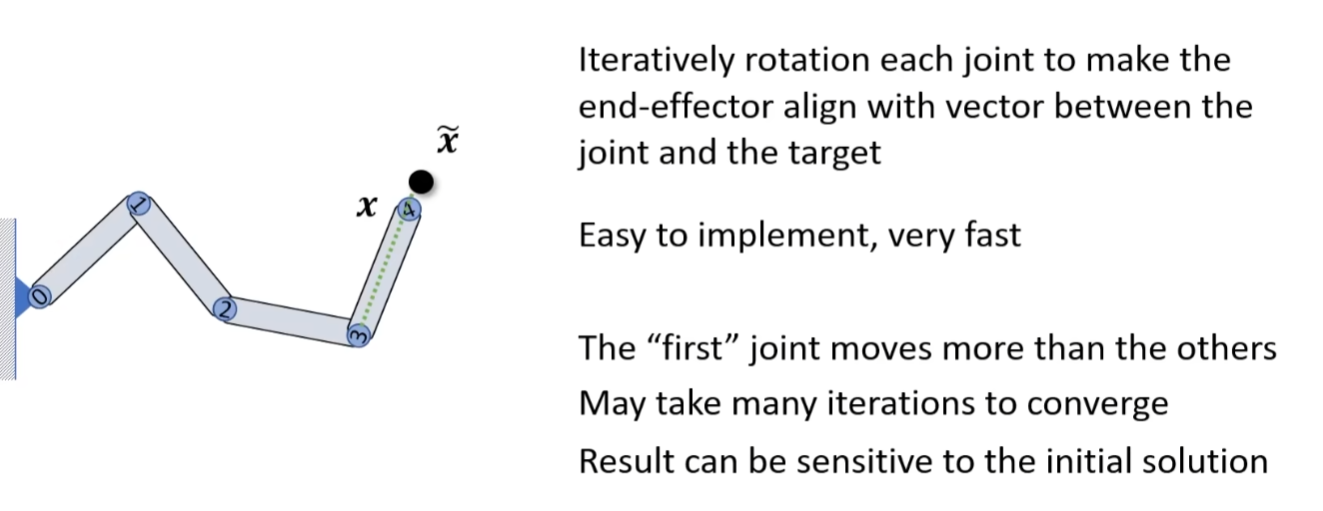
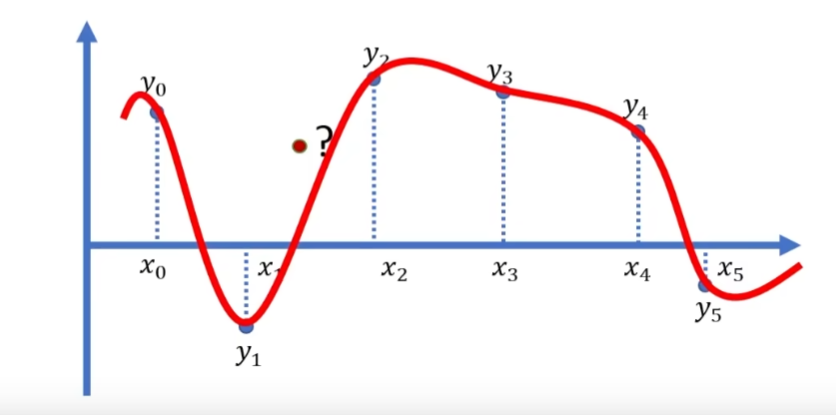
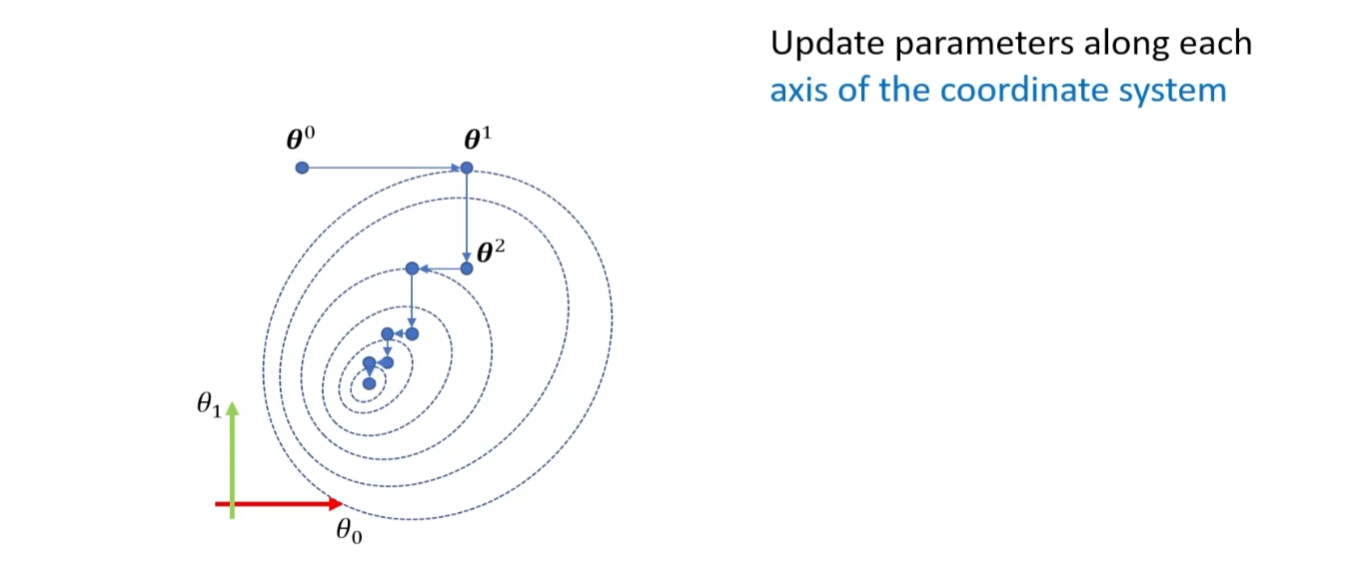 CCD放在IK来解释就是每次只旋转一个关节
下图就是只旋转3,让3-4朝向正确(也就是寻找了x离目标位置最近的位置)
CCD放在IK来解释就是每次只旋转一个关节
下图就是只旋转3,让3-4朝向正确(也就是寻找了x离目标位置最近的位置)
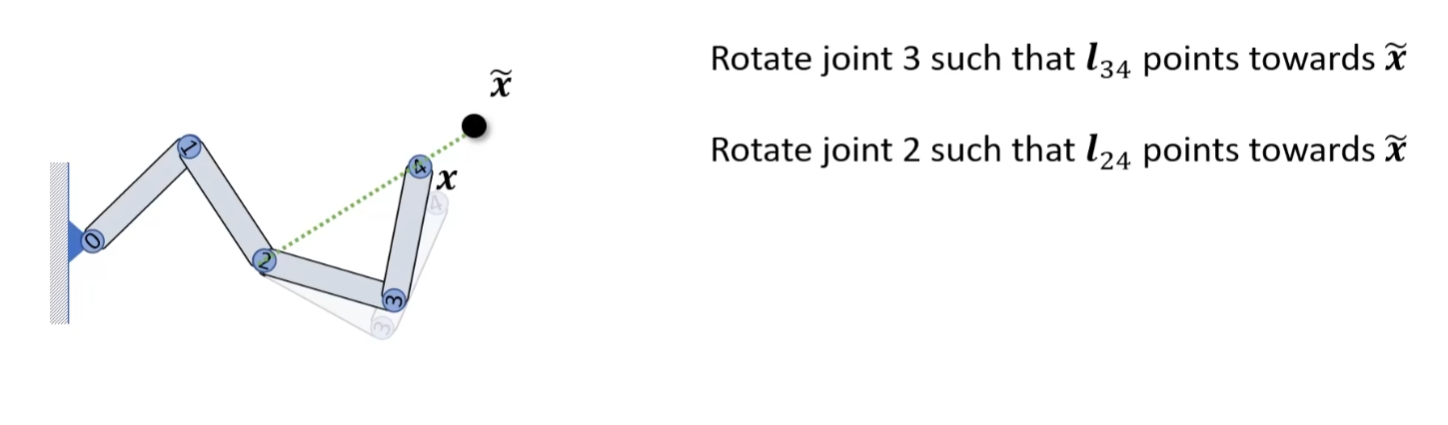 依此类推
依此类推
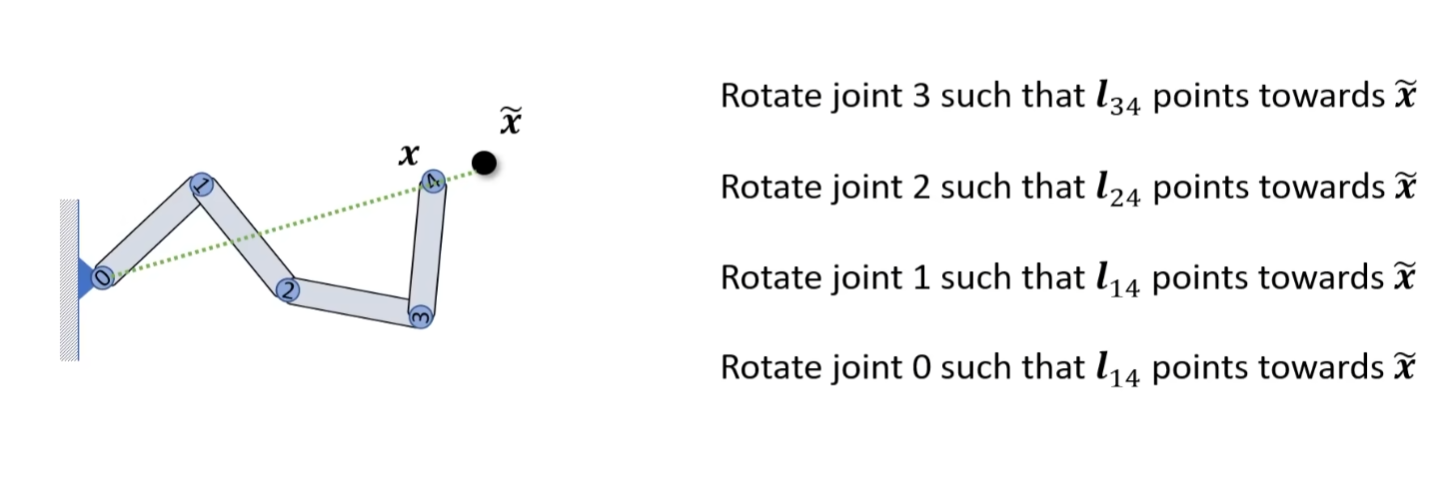 之后再回到4关节进行循环
之后再回到4关节进行循环
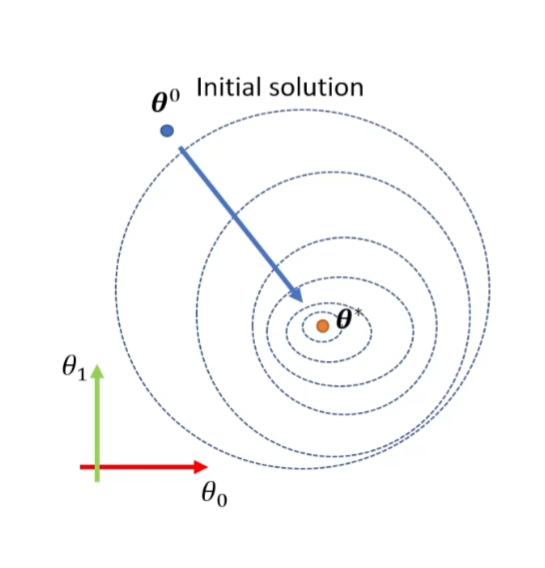
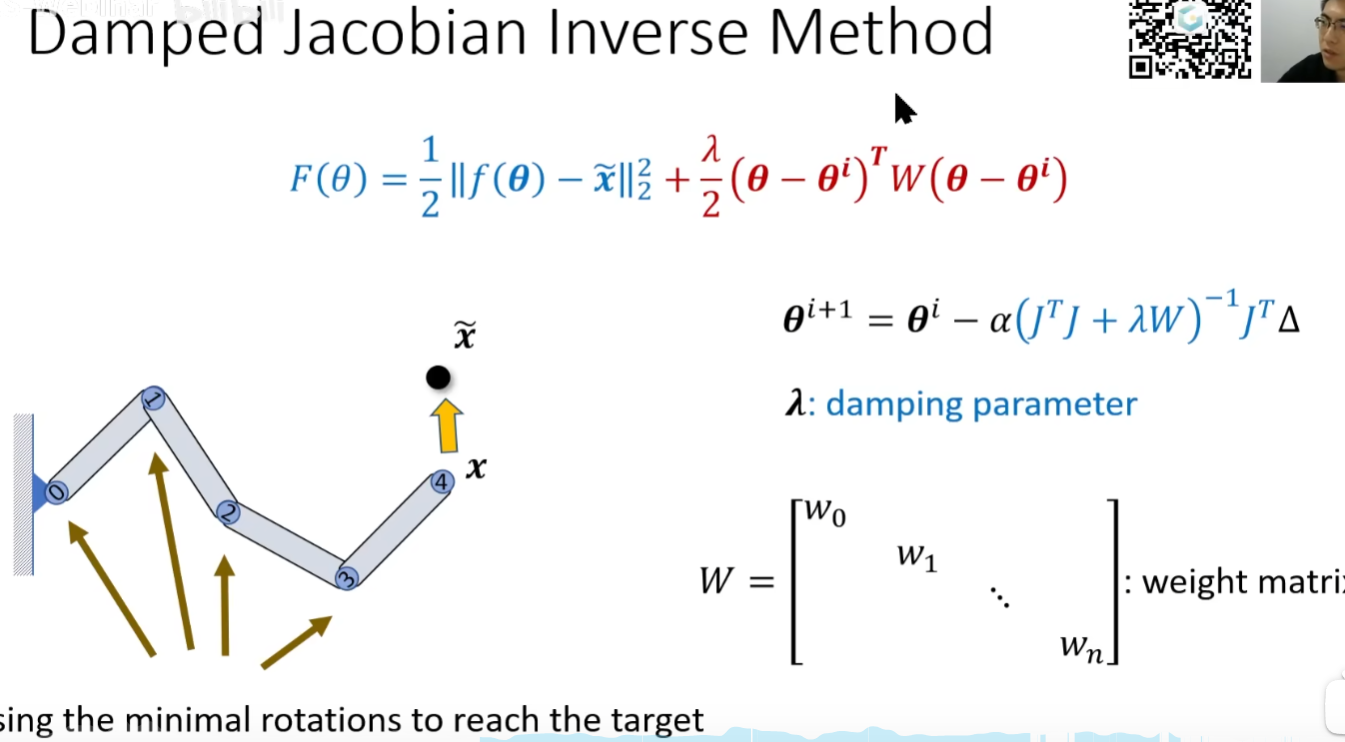
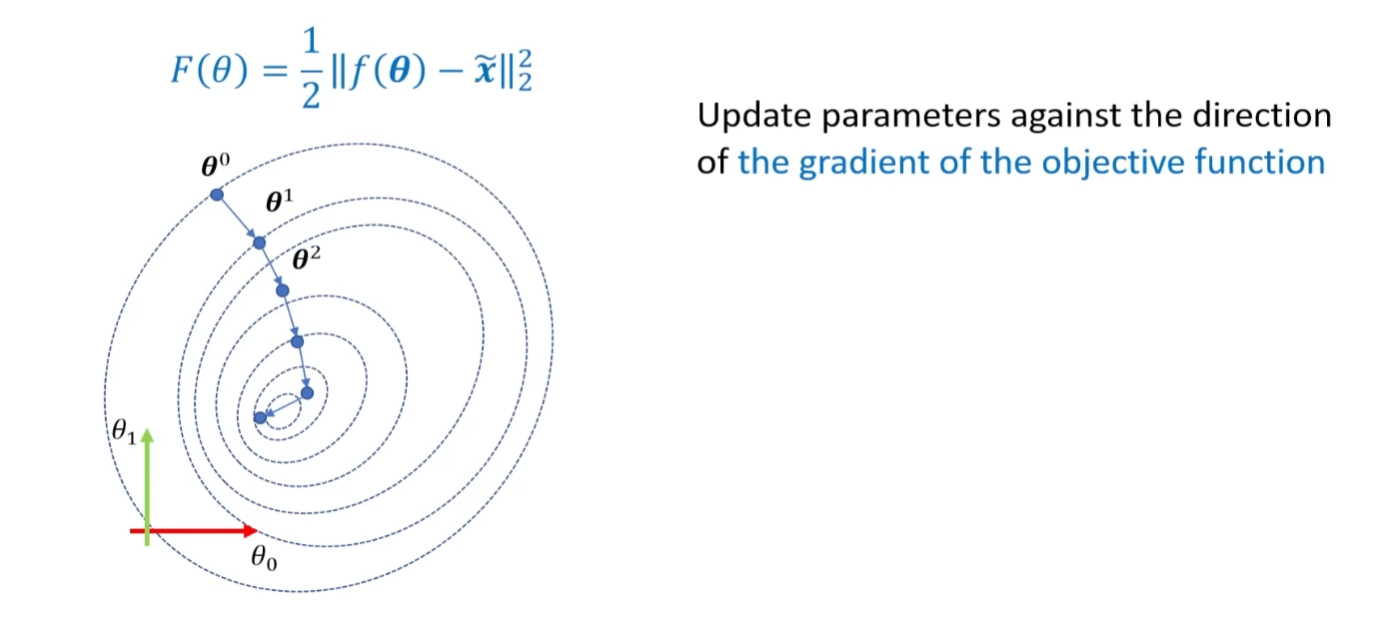 也就是说每个参数的更新方向都是下降最快的方向
也就是说每个参数的更新方向都是下降最快的方向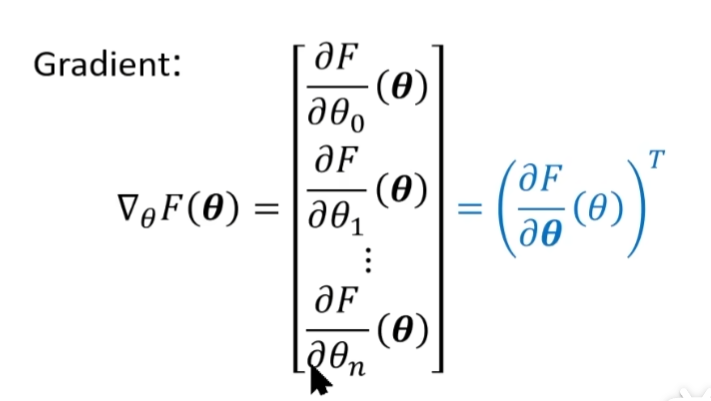 参数的更新公式
参数的更新公式
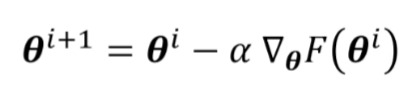 红色的这一项是控制梯度更新是往正方向还是负方向(因为下降过头还得回来)
红色的这一项是控制梯度更新是往正方向还是负方向(因为下降过头还得回来)
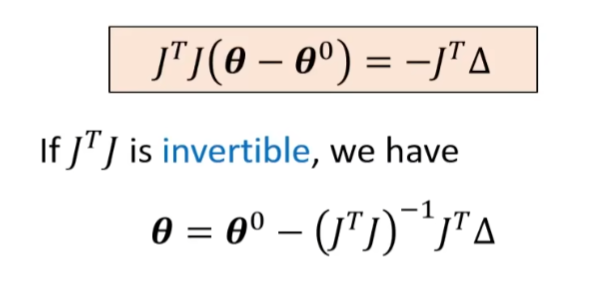
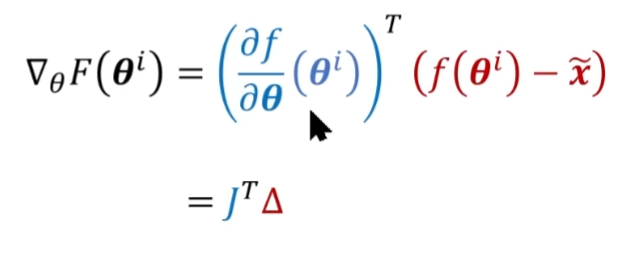 前边梯度的倒数构成的矩阵也可以叫做雅可比矩阵(f对每个参数求导的结果组成的矩阵)
前边梯度的倒数构成的矩阵也可以叫做雅可比矩阵(f对每个参数求导的结果组成的矩阵)
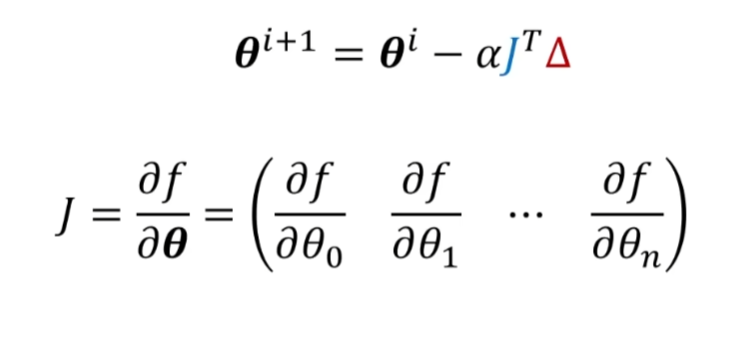 下降梯度法也可以就雅可比转置法。
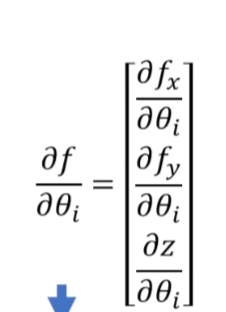
对于IK问题,他输出是一个点,是三维的输出(x,y,z)所以雅可比矩阵应该是三维的
下降梯度法也可以就雅可比转置法。
对于IK问题,他输出是一个点,是三维的输出(x,y,z)所以雅可比矩阵应该是三维的


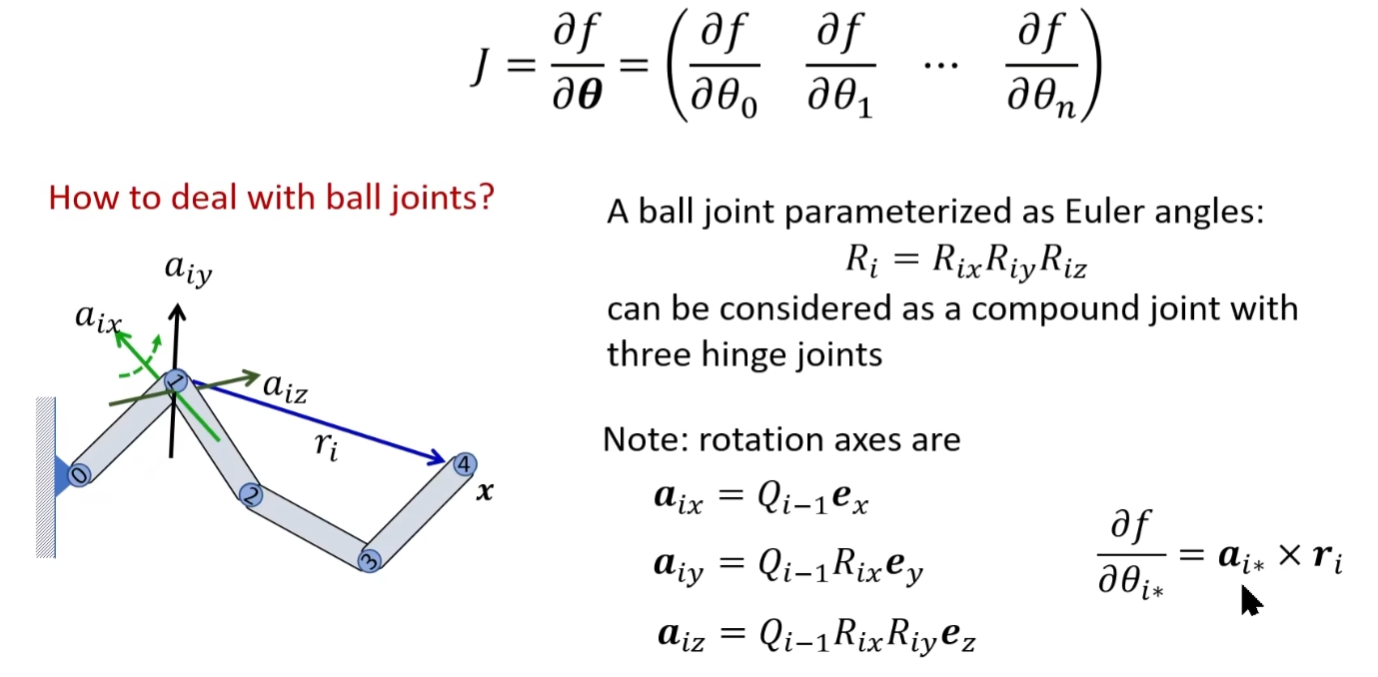
 (针对ball 3自由度的关节)很难理解的,选择不理解,知道是可以的就行
(针对ball 3自由度的关节)很难理解的,选择不理解,知道是可以的就行

 听个。。
听个。。
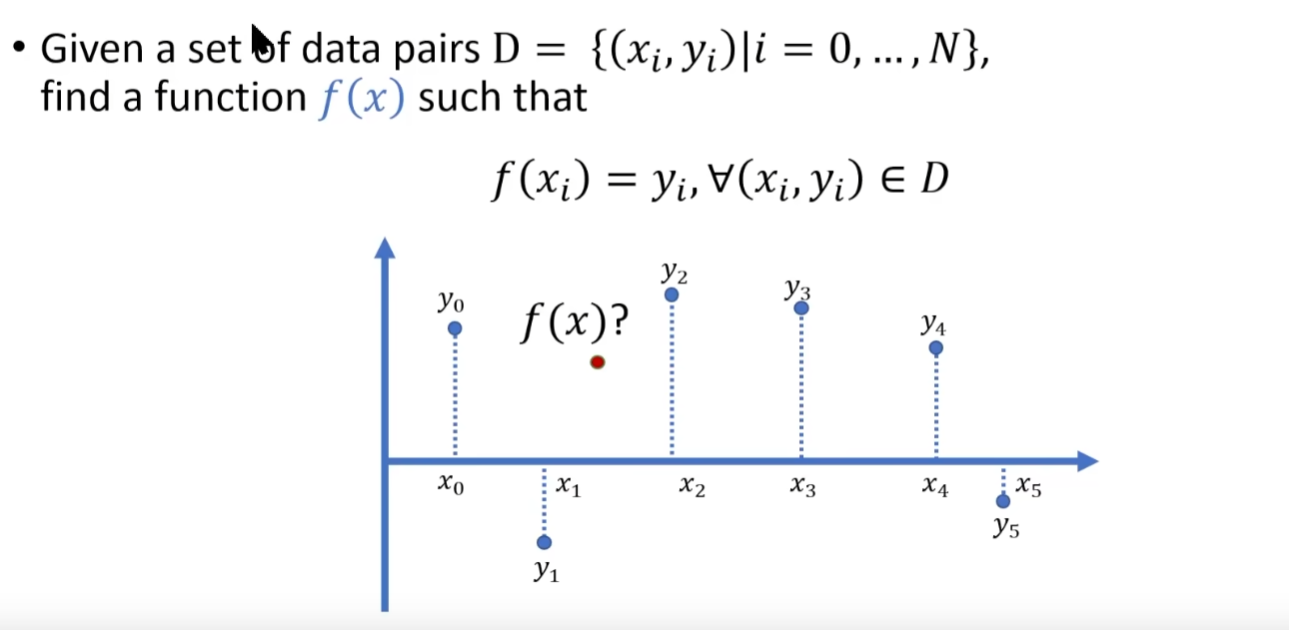
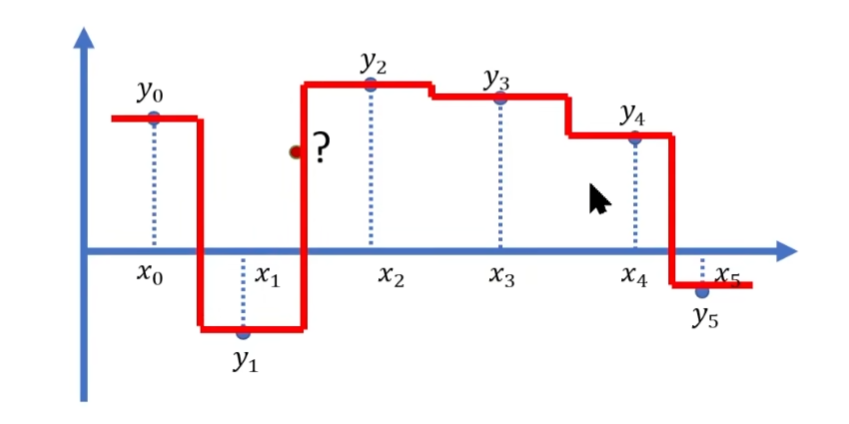
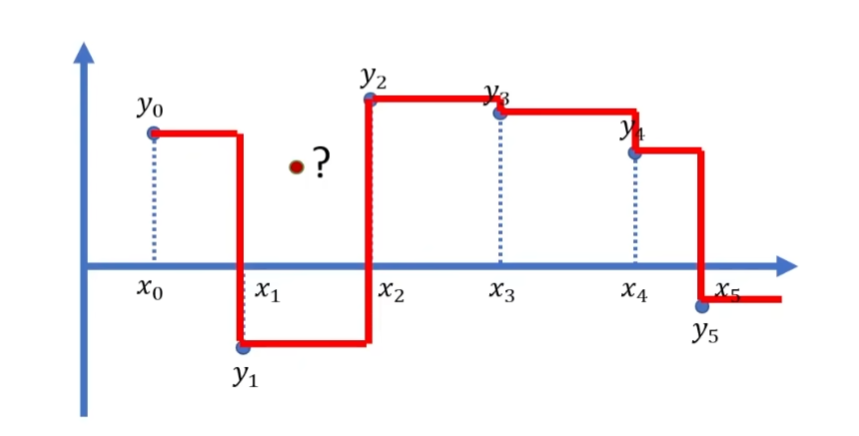 也可以是离当前点最近的点的值作为f(x)
也可以是离当前点最近的点的值作为f(x)
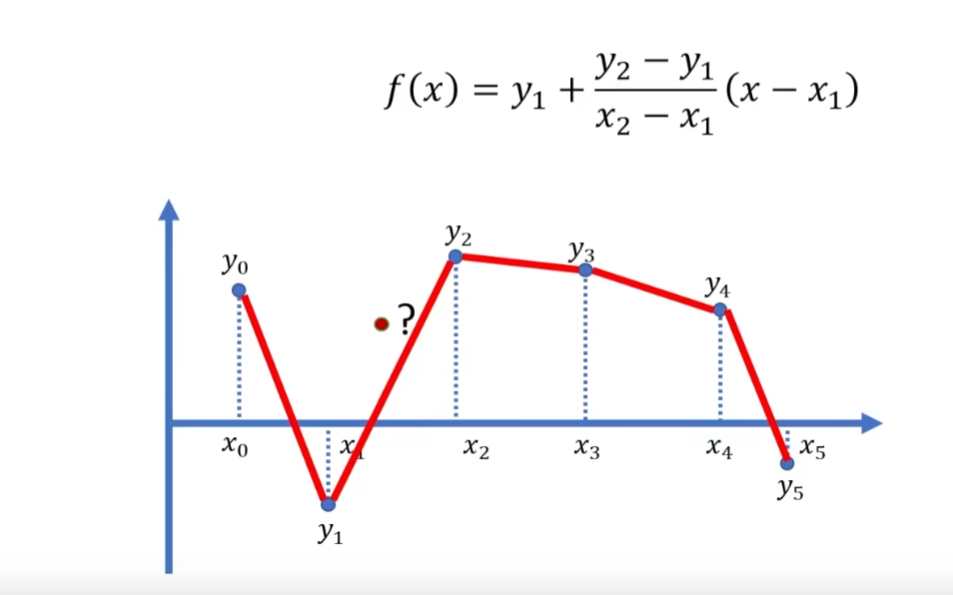
 计算参数就是把已知点带进去
计算参数就是把已知点带进去
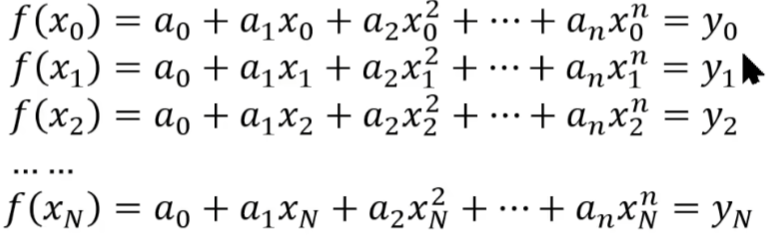 然后用矩阵求解。 这里就能看出需要多少个采样点
然后用矩阵求解。 这里就能看出需要多少个采样点
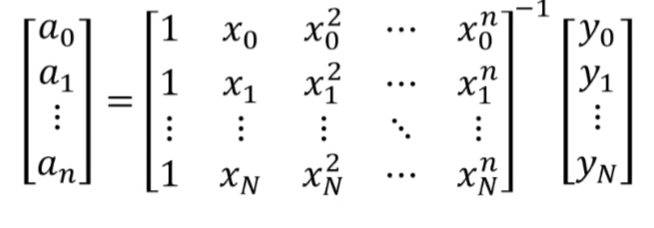
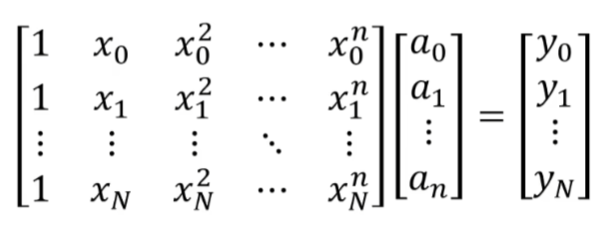 把矩阵求逆就可以求出参数a
把矩阵求逆就可以求出参数a
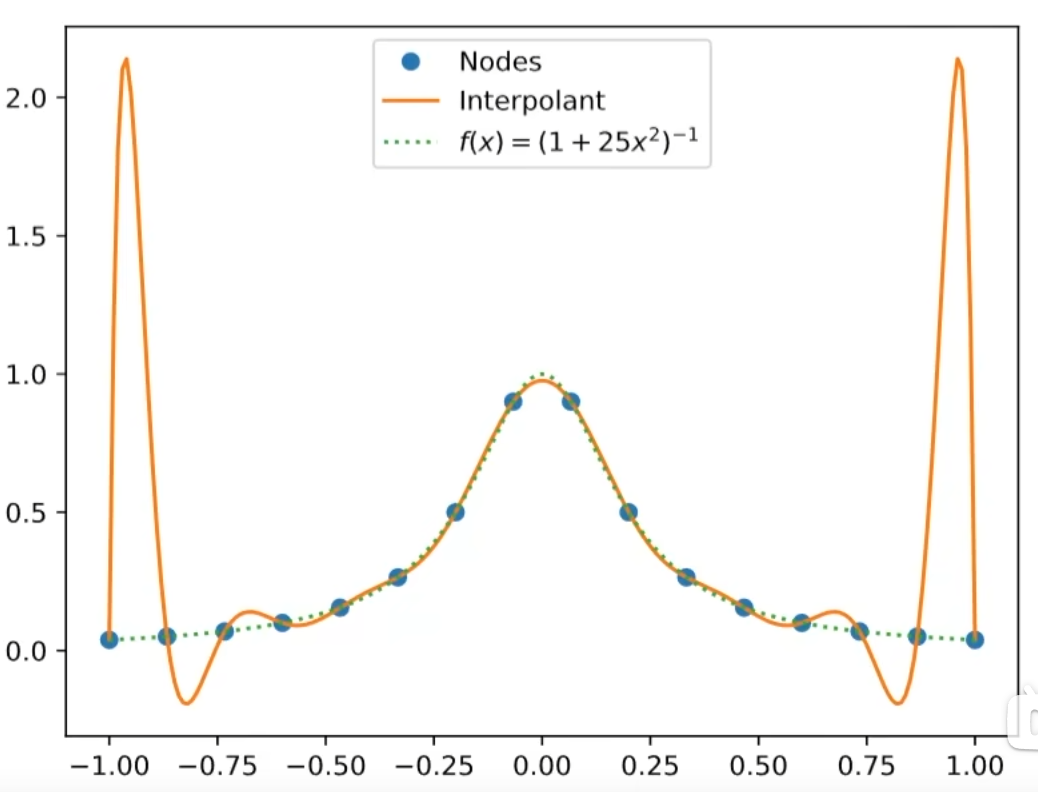
 常用的是Cubic Splines (三次样条插值)
常用的是Cubic Splines (三次样条插值)
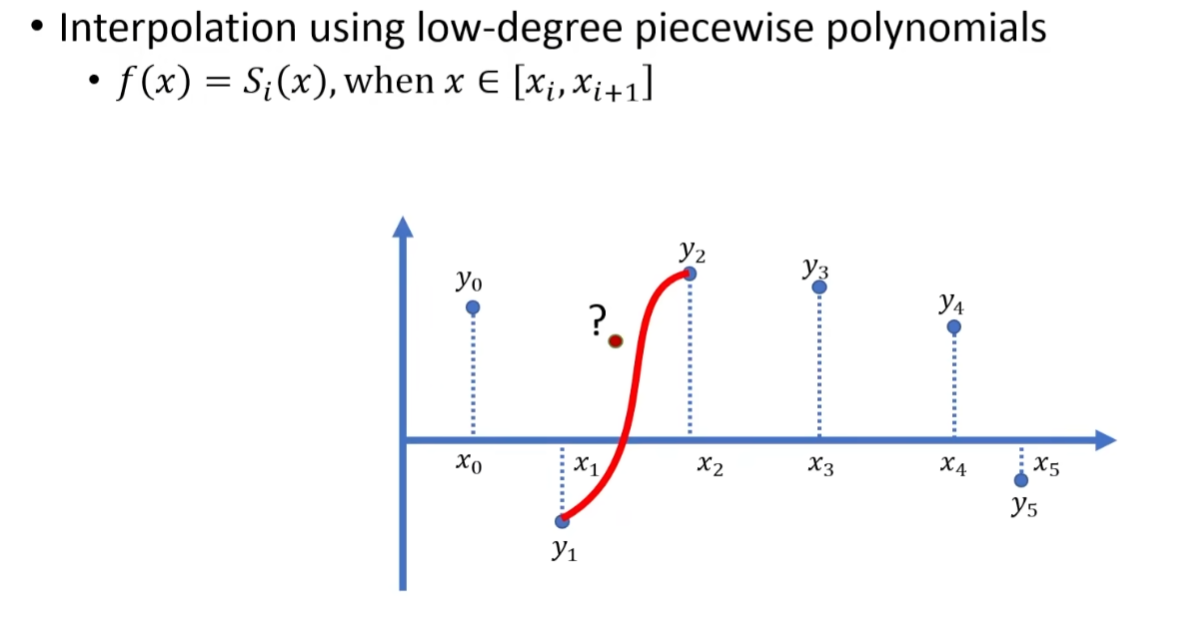
 计算时只需要相邻的两个采样点计算依次多项式参数。
如果总采样点是N+1,那一共有N段,每段都是一个三次多项式。每个多项式4个未知参数。所以一共有4N个未知参数。
计算时只需要相邻的两个采样点计算依次多项式参数。
如果总采样点是N+1,那一共有N段,每段都是一个三次多项式。每个多项式4个未知参数。所以一共有4N个未知参数。
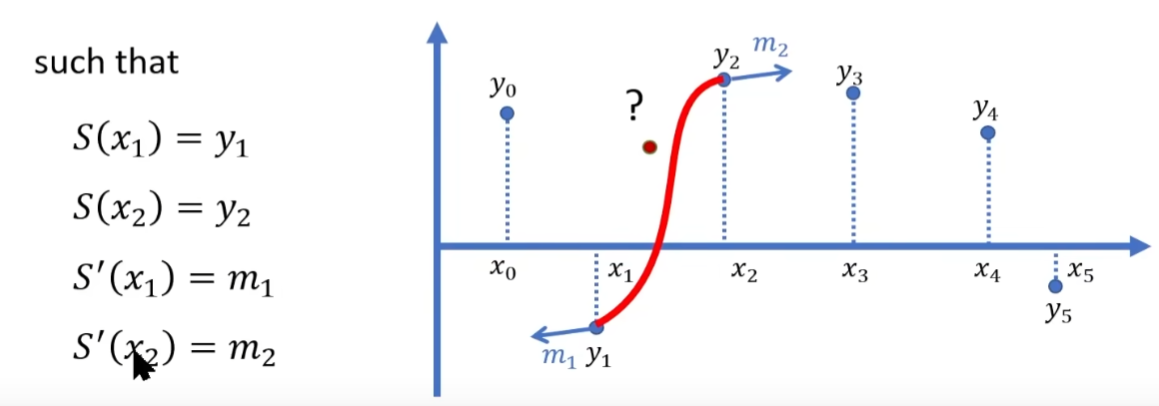
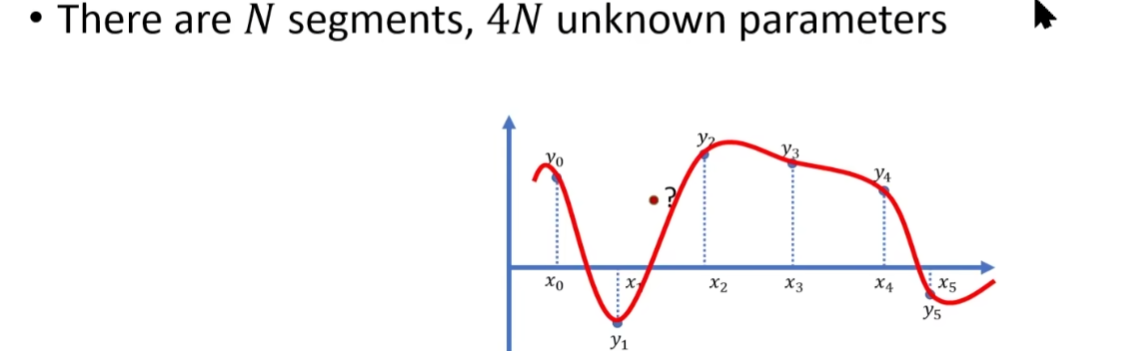 2个采样点信息没办法求出4个未知数。样条采样引入了别的规则。
2个采样点信息没办法求出4个未知数。样条采样引入了别的规则。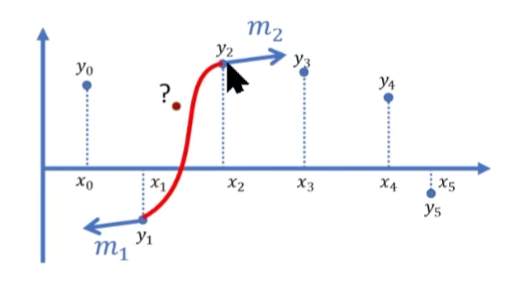 总结就是 4个方程4个未知数
总结就是 4个方程4个未知数
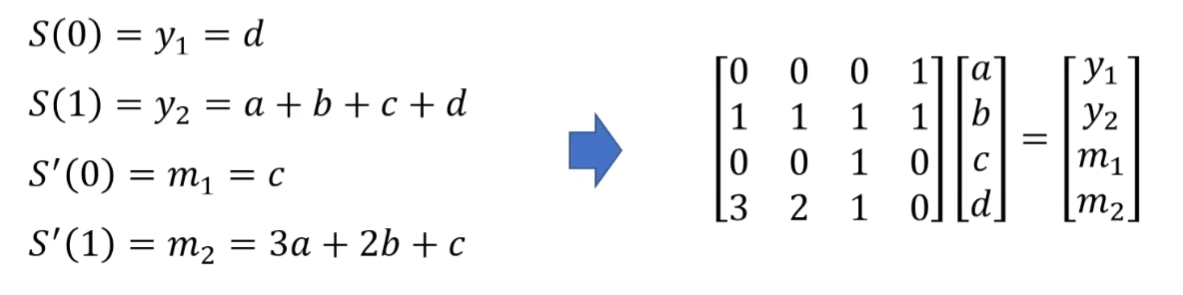 矩阵的逆都一步到位了,一次矩阵乘法就直接求解4个位置系数
矩阵的逆都一步到位了,一次矩阵乘法就直接求解4个位置系数
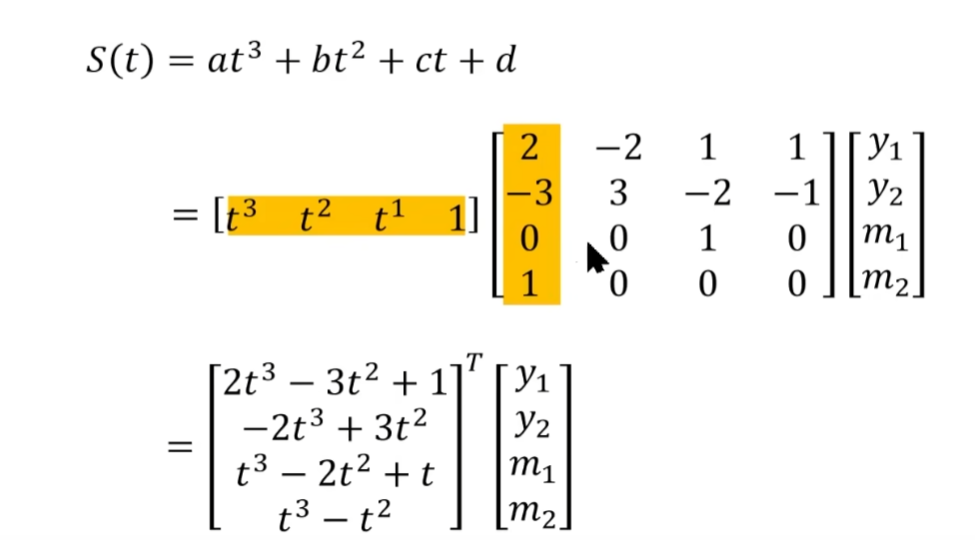
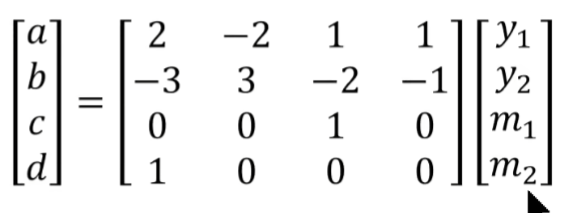 还可以把多项式直接写出矩阵形式
还可以把多项式直接写出矩阵形式
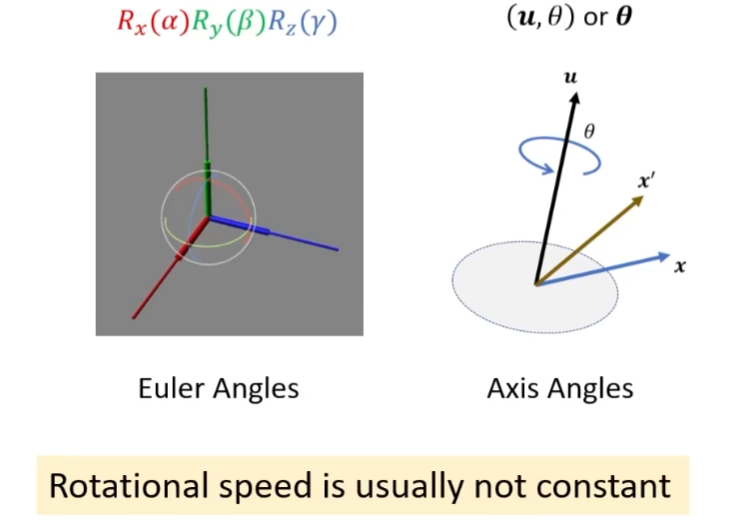 用四元数的slerp来恒定速度(但线性插值并单位化四元数来插值不恒定)
用四元数的slerp来恒定速度(但线性插值并单位化四元数来插值不恒定)