这里主要说出了三角形渲染,还有其他的渲染方式,主要是了解各种优化渲染技巧
天空盒
…
光场渲染
Radiance 捕获与计算摄影
- Radiance(辐射亮度)可以在:
- 不同位置
- 不同方向
- 不同时间
- 不同光照条件 下进行捕获。
- 计算摄影领域研究如何从这些捕获的数据中提取有用结果,例如高动态范围成像(HDR)、光照重建等。
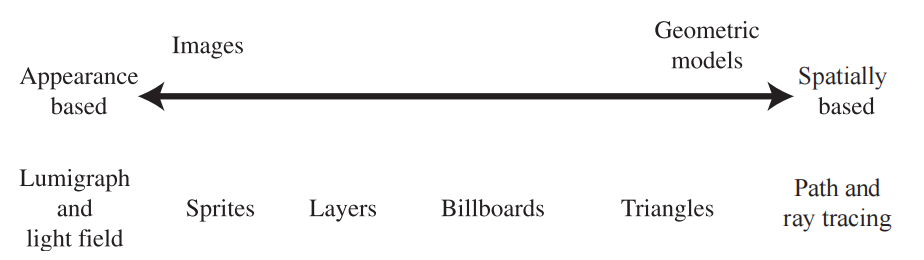
基于图像的物体表示
- Lumigraph 和 光场渲染(Light-field Rendering):
- 通过一组离散观察点捕获物体。
- 给定一个新视角,通过在已存储视图之间插值生成新视图。
- 类似于全息摄影(Holography):用二维视图数组表示物体。
- 优点:
- 能够表示任意复杂表面与光照。
- 显示速率几乎恒定,与物体几何复杂度无关。
- 缺点:
- 数据量大,需要存储大量视图。
Sprite和图层
Sprite(精灵图):
- 屏幕上可移动的图像元素,例如鼠标光标、游戏角色。
- 不一定是矩形,支持透明像素。
- 简单sprite:每个像素直接映射到屏幕像素。
- 动画sprite:通过显示不同的sprite序列生成动画。
通用sprite:
- 将纹理渲染到始终面向观众的多边形(通常是四边形)上。
- 支持大小调整和拉伸。
- Alpha通道提供透明度和边缘抗锯齿。
- 可包含深度信息,使sprite有三维位置。
场景可以看作是一系列sprite层:
- 典型例子:二维序列帧动画(cel animation)。
- 每层都有深度信息,用于确定前后关系。
渲染顺序:
- 画家算法(Painter’s Algorithm):从后向前渲染,无需z-buffer。
- 相机移动时:
- 物体变大 → 可使用相同sprite或mipmap处理。
- 前景与背景的相对覆盖可通过修改sprite层位置调整。

广告牌技术
基于观察方向来修改纹理矩形朝向的技术被称为广告牌技术(billboarding),这个矩形被称为广告牌(billboard)
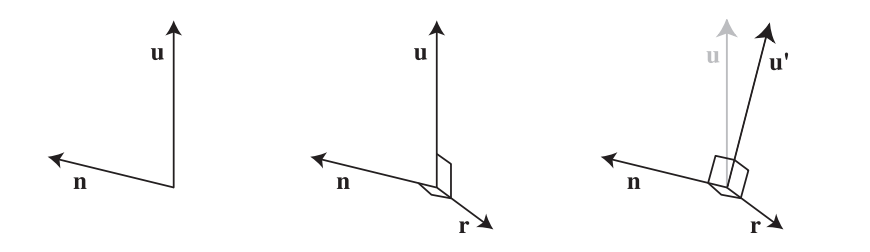
这就是通过两个向量构建正交基的办法:首先,计算 right 向量:
$$ \mathbf{r} = \mathbf{u} \times \mathbf{n} $$然后,用 right 向量 和法线重新计算一个正交的 up 向量:
$$ \mathbf{u}' = \mathbf{n} \times \mathbf{r} $$最终得到一个标准正交基:
$$ \{\mathbf{r}, \mathbf{u}', \mathbf{n}\} $$这样 $\mathbf{r}$、$\mathbf{u}’$ 和 $\mathbf{n}$ 三个向量两两垂直。
有了这些初步的准备,剩下的主要任务就是决定用什么表面法线和up向量来定义广告牌的方向。构建正交基 + 平移 + 缩放的操作,其核心目的就是生成模型变换矩阵(Model Matrix),也就是把广告牌从局部模型空间变换到世界空间的矩阵。
屏幕对齐(screen-aligned)的广告牌
-
法线向量:
$$ \mathbf{n} = -\mathbf{v}_n $$- $\mathbf{v}_n$ 是视平面法线,指向远离观察点。
- 法线指向观察者。
-
Up 向量:
$$ \mathbf{u} = \text{camera up vector} $$- 定义了广告牌在视平面上的上方向。
-
Right 向量:
$$ \mathbf{r} = \mathbf{u} \times \mathbf{n} $$- 由 up 和法线叉乘得到,完成正交基。
-
旋转矩阵:
$$ R = [\mathbf{r} \;\; \mathbf{u} \;\; \mathbf{n}] $$
面向世界(world oriented)的广告牌
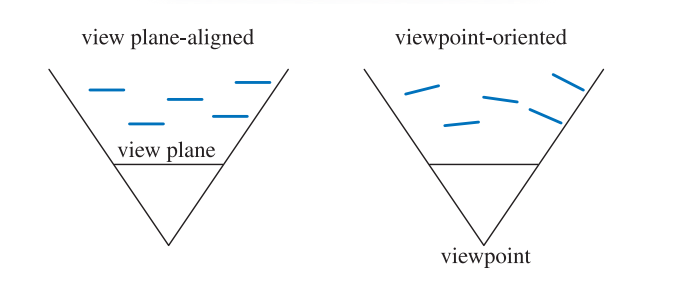
两种不同对齐方式的广告牌的俯视图。根据不同的对齐方法,五块广告牌的朝向也不同。
| 特性 | 屏幕对齐(Screen-aligned) | 面向视点(Viewpoint-oriented) |
|---|---|---|
| 法线方向 | 固定指向视平面 | 指向观察者 |
| 扭曲情况 | 对所有sprite相同,远处可能被拉伸 | 遵循真实透视,投影形变正确 |
| 使用场景 | 小sprite、文本注释、地图标记 | 粒子效果、火焰、烟雾、爆炸等 |
| 渲染复杂度 | 低 | 高,需要每帧计算法线 |
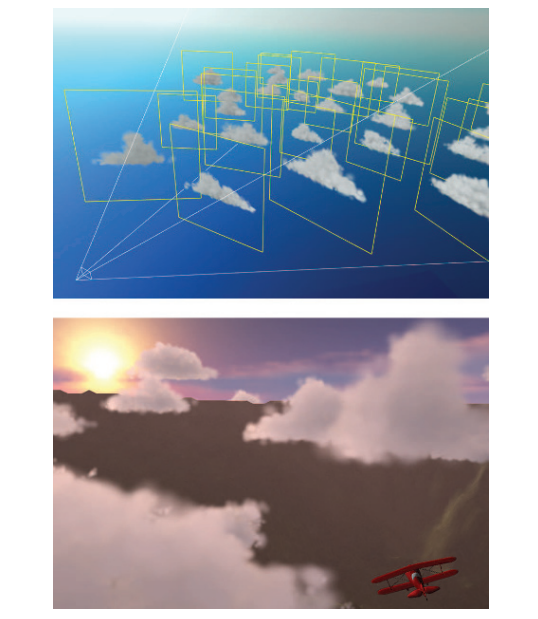
Wang [1839, 1840]详细介绍了微软飞行模拟器产品中所使用的云建模和渲染技术。每片云都由5到400块广告牌组成,但是只需要16种不同的基本sprite纹理即可实现各种各样的云,因为这些基本的sprite纹理可以使用非均匀缩放和旋转来进行修改,从而组合形成各种各样类型的云。还会根据距离云中心的距离来修改该点的透明度,从而模拟云的形成和消散。为了节省处理时间,远处的云都被渲染为一组环绕场景的8个全景纹理,类似于天空盒。
轴向广告牌
最后一种常见类型的广告牌被称为轴向广告牌(axial billboarding)。在这个方案中,被纹理化的物体通常并不会直接面对观察者。相反,它可以围绕一些固定的世界空间轴进行旋转,并在这个范围内尽可能多地面向观察者。
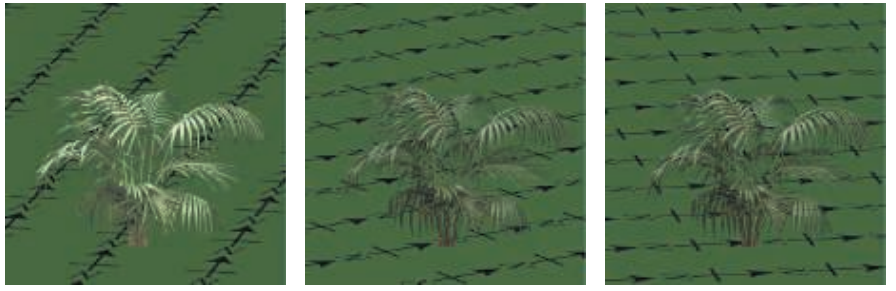
当观察者在场景中移动时,灌木广告牌会发生旋转以面向前方。在这个例子中,灌木从南面被照亮,因此不断变化的视野会使得整体着色随着旋转而发生变化。
| 广告牌类型 | 法线朝向 | Up 向量 | 特点 | 示例 |
|---|---|---|---|---|
| 屏幕对齐(Screen-aligned) | 固定视平面法线 | 相机 up | 固定旋转矩阵,适合小sprite/文本 | HUD、标记 |
| 面向视点(Viewpoint-oriented) | 指向观察者 | 尽量对齐世界 up | 可保持透视形变 | 粒子效果、火焰、爆炸 |
| 轴向(Axial) | 尽量面向观察者,但绕固定轴 | 世界 up | 保持直立,适合圆柱形对称物体 | 远景树木、光柱、激光束 |
Impostor
Impostor 是一个广告牌,通过渲染复杂物体到纹理上,然后将纹理映射到广告牌上,替代原始几何体。
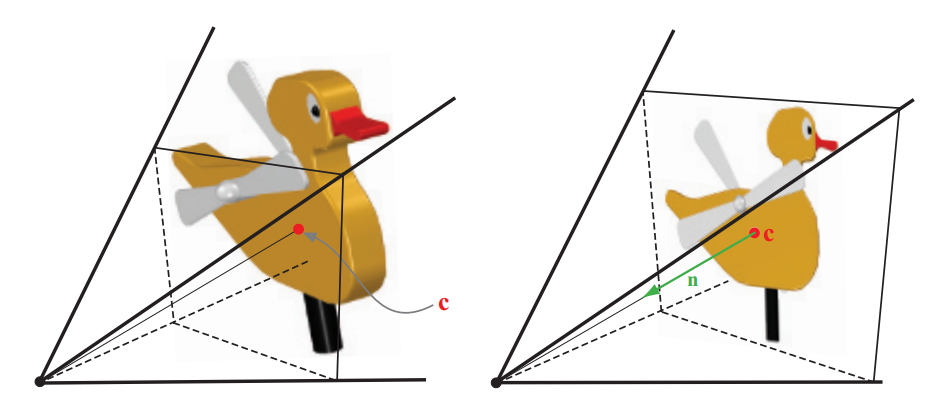
在左边,通过视锥体从侧面观察物体,从而创建了一个impostor。观察方向朝向物体的中心点\mathbf{c},使用这个相机设置渲染一副图像,并将其用作impostor纹理。如右侧所示,将imposter纹理应用于一个四边形上。impostor的中心等于原始物体的中心,法线(从imposter中心发出)直接指向视点。
位移技术
通过图像编码几何信息:不仅是颜色,也包括高度、深度、法线
优势:
- 减少几何复杂度
- 与传统impostor或sprite相比,渲染更真实
应用场景:
- 远景人群、粒子系统、点云
- 复杂表面细节建模(纹理化模拟几何)
粒子系统
等学习GPU粒子时再记录
定义:由独立微小物体组成的集合,通过算法控制运动和生命周期(创建、移动、修改、删除)。
应用:火、烟、爆炸、水流、星系等自然现象和特效。
渲染:
- 每个粒子可以是单像素、轨迹线段或四边形广告牌(sprite)。
- 圆形粒子可只考虑位置,不必考虑旋转方向。
- 可以用几何着色器生成,也可用顶点着色器生成,后者更高效。
纹理:可使用颜色、法线、法线贴图等。
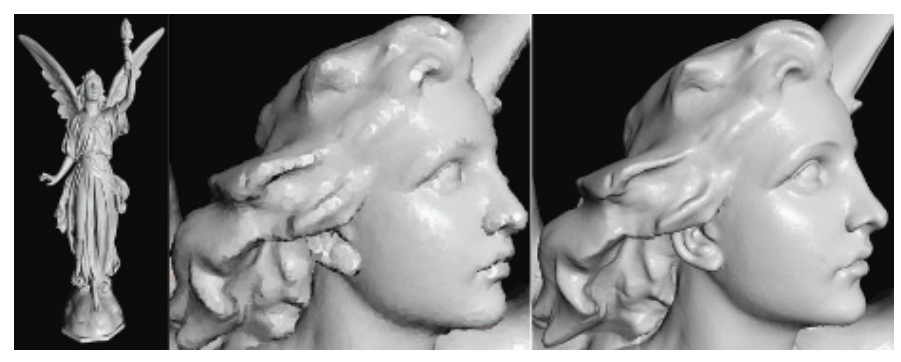
点渲染
- 概念:使用点(point)作为基本图元来表示物体表面,然后通过高斯滤波填补点之间的空隙。
- 历史:
- 1985 年,Levoy 和 Whitted 首次提出。
- 约 15 年后再次兴起,原因:
- 计算能力提升,支持交互速率渲染;
- 激光扫描仪等设备提供高密度点云数据(RGB-D、LIDAR、Kinect、iPhone TrueDepth、Tango、自动驾驶激光雷达等)。
- 点云数据:每个点通常包含位置、颜色/强度,有时还有分类信息(建筑、路面等)。
体素
体素化输入来源
- 点云:扫描设备生成的任意位置点。
- 多边形网格:通过 GPU 加速体素化。
- 医学影像:通过切片堆叠生成体素。
- 图像集合:可通过视觉外壳(visual hull)或轮廓切割生成体素。
常见体素化方法
- 六正交视图体素化(Karabassi et al.):
- 从六个方向(上下左右前后)渲染深度。
- 标记不可见体素为内部体素。
- 优点:可识别内部体素;缺点:漏掉六视图不可见特征。
- 视觉外壳体素化(Loop et al.):
- 基于相机捕获的轮廓图像生成体素。
- 只在可见像素位置生成体素,适合人体重建。
- 切片渲染体素化(Eisemann & Decoret):
- 使用 32bit 渲染目标存储多层体素(slicemap)。
- 优点:可在 GPU 上一次渲染多层。
- 局限:只生成表面体素,无法识别内部体素。
- 现代 GPU 体素化:
- 计算着色器 + 图像加载/存储操作:
- 支持随机读写纹理。
- 可进行保守光栅化,记录与体素重叠的三角形。
- 可直接构建 SVO(Sparse Voxel Octree):
- 自上而下体素化非空节点。
- 自下而上 mipmap 填充结构。
- 动态场景处理:
- 渐进式更新体素(progressive voxelization)。
- 使用深度缓冲清除/设置体素。
- 计算着色器 + 图像加载/存储操作:
体素类型
- 实体体素:内部体素和外部体素完全分离。
- 26-分离体素:内部体素不与外部体素共享面、边或顶点。
- 6-分离体素:内部体素与外部体素共享边角(更保守的表面表示)。
存储方式
- 体素数据通常存储在三维数组或三维纹理中。
- 每个体素可用 bit 或更高精度数据表示状态(内部/外部、密度、颜色、法线等)。
渲染方法
- 直接立方体渲染:
- 将每个体素绘制为立方体。
- 相邻立方体共享面可剔除,减少多边形数量。
- 可使用快速贪心算法进一步合并小面片。
- 表面提取(Surface Extraction):
- Marching Cubes:
- 每个体素的 8 个角点确定表面穿过位置。
- 通过查表生成三角形网格。
- 可插值顶点位置以获得平滑表面。
- 水平集(Level Set):
- 体素存储到表面的距离(正内部,负外部)。
- 可直接进行光线追踪或调整网格顶点位置。
- Marching Cubes:
- 稀疏体素光线投射:
- 针对稀疏体素数据直接进行光线投射。
- GPU 高效实现,支持交互式帧率。
- 锥形追踪(Cone Tracing):
- 类似 mipmap 的采样方法。
- 支持软阴影、景深、可变法线滤波。
- 利用体素规则性进行区域采样。
优化与数据结构
- 八叉树(Octree):
- 优点:易构建,支持稀疏数据。
- 缺点:树遍历开销大,动态变化不便。
- VDB 树 / 索引表:
- 提高 GPU 光线追踪性能。
- 支持动态体素变化。
- 可分块流式加载,处理大规模场景。