内容包括:1. 将点光源拓展到面光源,并且介绍了一些在Lambertian表面或Glossy表面的实现方案 2.环境光照针对高光和漫反射的模拟的各种实现方案 3. 引入SH预计算的概念
局部光照 (Local Illumination)
局部光照模型只考虑光源直接照射到表面点的光照贡献,忽略:
- 来自其他物体表面反射的间接光(Global Illumination 的一部分)
- 场景中可能存在的全局光能量传播效应(如颜色反弹、光子映射、环境光照等)
也就是说,它计算的 $L_o$ 只来自:
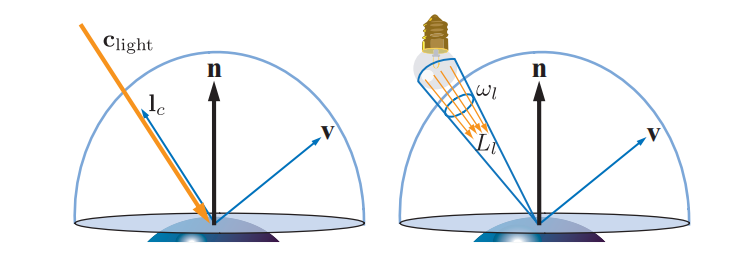
$$ L_o(\mathbf{p}, \mathbf{v}) = \sum_{\text{光源 } i} \int_{\omega_{L_i}} f_r(\mathbf{p}, \mathbf{l}, \mathbf{v}) L_i(\mathbf{p}, \mathbf{l}) (\mathbf{n}\cdot\mathbf{l})^+ d\mathbf{l} $$- 积分域 $\omega_{L_i}$ = 光源 i 在半球上所占立体角
- 如果光源面积很小 → 可以近似为点光源
- 只计算直接光照 → 计算量低,适合实时渲染
面光源
这一节主要是对一些面光源的积分运算在diffuse和glossy表面的实时渲染近似方案
球体使用了GGX BRDF来进行渲染,从左到右,球体材质的表面粗糙度递增。最右侧图像和最左侧图像是一样的,只是将其垂直翻转了过来。请注意,在低粗糙度的材质上,由大圆盘灯引起的高光和着色效果,与较小光源在高粗糙度材质上所引起的高光效果,在视觉上面十分相似。
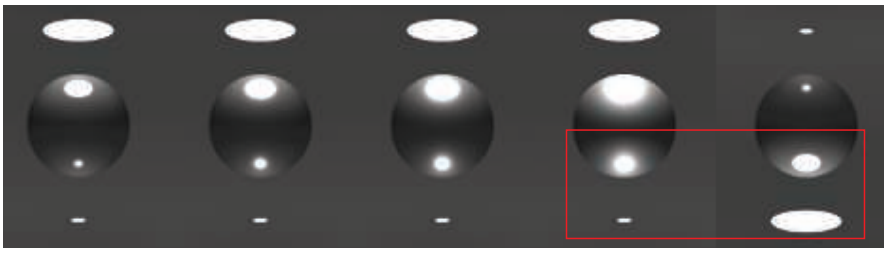
这张图意思是使用点光源,并且调整粗糙度后,可以用来近似面光源的镜面效果。
Lambertian表面
对于Lambertian表面这种特殊情况,直接使用点光源来表示面光源是很精确的。对于这样的表面,其出射的radiance与irradiance成正比:
$$ L_{o}(\mathbf{v})=\frac{\rho_{\mathrm{ss}}}{\pi} E \tag{10.2} $$也就是说对于Lambertian表面只要接受到的irrandance一致,那最终的radiance就是一样的。所以可以直接用点光源代替面光源(只是在Lambertian表面)
向量irradiance
这里说的一堆东西是一种用点光源代替面光源近似计算的实现方案,使用它的方法求出来的净辐照度来代替对整个面光源的积分运算
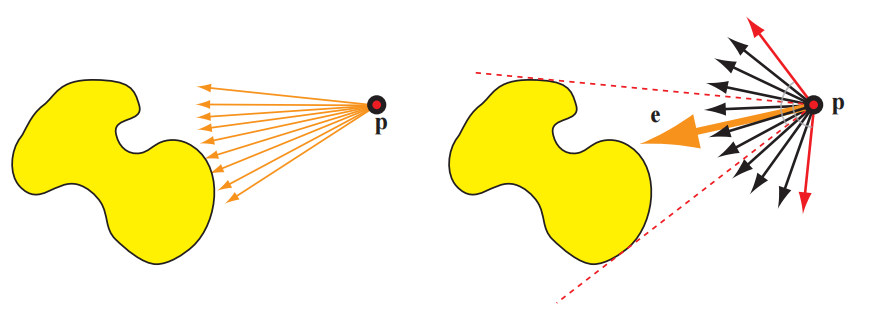
向量irradiance(vector irradiance)的概念对于当面光源存在时,理解irradiance的行为十分有用。向量irradiance的概念由Gershun [526]提出,他将其称之为光源向量(light vector),Arvo [73]将这个概念进一步推广。利用向量irradiance,可以将任意大小和任意形状的面光源,精确地转换为点光源或者方向光。
这里的向量irradiance计算过程
$$ \mathbf{e}(\mathbf{p})=\int_{\mathbf{l} \in \Theta} L_{i}(\mathbf{p}, \mathbf{l}) \mathbf{l} d \mathbf{l} \tag{10.4} $$
左图:点$\mathbf{p}$被各种具有形状、大小、radiance分布的光源所包围,其中黄色的明亮程度代表了光源发射出的radiance数量。以点$\mathbf{p}$为起点的橙色箭头代表了向量,它指向任何存在入射radiance的方向,每个向量的长度,等于来自该方向上的radiance乘以箭头所覆盖的无限小的立体角。原则上应当存在无穷多个箭头。右图:向量irradiance(橙色大箭头)是左图中所有橙色向量的总和。向量irradiance可以用来计算任意平面在点$\mathbf{p}$处的净irradiance。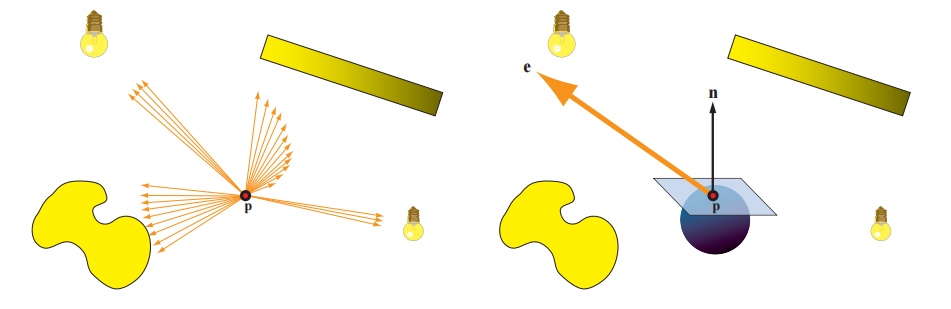
其中$\mathbf{n}$是平面的表面法线。通过平面的净irradiance,是指流经平面“正面”(表面法线$\mathbf{n}$所指向的方向)和流经平面“背面”的irradiance之差。虽然说净irradiance本身对于着色计算来说没有什么用处,但是如果说没有任何radiance被发射通过平面的“背面”的话(换句话说,对于所分析的光线分布,光线方向$\mathbf{l}$和表面法线$\mathbf{n}$之间的夹角都不会超过$90^{\circ}$,所有的入射光线都来自于着色点的正半球方向),即$E(\mathbf{p},-\mathbf{n})=0$,那么此时有:
$$ E(\mathbf{p}, \mathbf{n})=\mathbf{n} \cdot \mathbf{e}(\mathbf{p}) \tag{10.6} $$
如果入射radiance $L_i$与波长无关的假设不成立的话,那么在一般情况下,我们就不能再定义单个向量irradiance $\mathbf{e}$了。然而,彩色光通常在所有点上都具有相同的相对光谱分布,这意味着我们可以将$L_i$分解为颜色$\mathbf{c}^{\prime}$,以及与波长无关的radiance分布$L_i^{\prime}$。在这种情况下,我们可以计算$L_i^{\prime}$的向量irradiance $\mathbf{e}$,并对方程10.6进行一些扩展,将$\mathbf{n} \cdot \mathbf{e}$乘上颜色$\mathbf{c}^{\prime}$。这样做的结果与计算方向光irradiance的方程相同,只是做了以下替换:
$$ \begin{aligned} \mathbf{l}_{c} & =\frac{\mathbf{e}(\mathbf{p})}{\|\mathbf{e}(\mathbf{p})\|}, \\ \mathbf{c}_{\text {light }} & =\mathbf{c}^{\prime} \frac{\|\mathbf{e}(\mathbf{p})\|}{\pi} .\end{aligned} \tag{10.7} $$到此为止,我们已经可以将任意形状和任意大小的面光源转换为方向光,同时不会引入任何误差。
对于一些简单情况,用于求取向量irradiance的方程10.4可以求出解析解。例如:想象现在有一个以$\mathbf{p}_l$为中心、半径为$r_l$的球形光源。球面上的每一点都会向各个方向发出具有恒定radiance $L_l$的光线。对于这种光源,将方程10.4和方程10.7联立,可以获得如下结果:
$$ \begin{aligned} \mathbf{l}_{c} & =\frac{\mathbf{p}_{l}-\mathbf{p}}{\left\|\mathbf{p}_{l}-\mathbf{p}\right\|}, \\ \mathbf{c}_{\text {light }} & =\frac{r_{l}^{2}}{\left\|\mathbf{p}_{l}-\mathbf{p}\right\|^{2}} L_{l} .\end{aligned} \tag{10.8} $$上述方程,与具有$\mathbf{c}{\text {light }{0}}=L_{l}, r_{0}=r_{l}$和标准距离平方反比衰减函数的泛光灯(章节5.2.2)完全相同。可以对这个衰减函数进行一些修正,使得光线从球体表面才开始发生衰减,并在光源的最大影响距离处衰减到0,有关这些调整的更多细节,详见章节5.2.2。
Glossy表面
与 Lambertian 表面(仅依赖入射辐照度总量)不同,非 Lambertian 表面(如光泽、高光表面)的出射亮度,不仅依赖入射光总量,还依赖入射光的方向分布—— 面光源在这类表面的核心视觉效果是 “与光源形状相似、边缘随粗糙度模糊的高光”
在实时渲染中,大多数对面光源光照效果的实用近似,都是基于了这样的一个想法:为每个着色点都寻找一个等效的精确光源,从而模拟非无穷小光源的效果。这种方法经常被用于实时渲染中,以解决各种各样的问题
粗糙度修正
- 核心逻辑:找到面光源入射辐照度的 “有效圆锥体” 和 BRDF 镜面波瓣的 “有效圆锥体”,用两个圆锥体的立体角之和,修正材质的粗糙度参数,让镜面波瓣 “变宽”,模拟面光源的柔和高光。
- 典型实现:Karis 将该思路应用于 GGX BRDF,修改粗糙度参数$(\alpha_g’ = \left(\alpha_{g}+\frac{r_{l}}{2\left|\mathbf{p}_{l}-\mathbf{p}\right|}\right)^{\mp})$(限制在 0-1 之间)。
- 优缺点:计算成本低,对中等光泽表面效果好;但对镜面级光滑表面失效(无法模拟锐利高光),且微表面 BRDF 的宽衰减特性会导致效果失真。
代表性点技术
- 核心逻辑:基于 “积分中值定理”,用面光源上对表面能量贡献最大的一个 “代表性点”,替代整个面光源(将面光源简化为一个点光源),类似蒙特卡洛积分的重要性采样思想。
- 关键操作:
- 选择代表性点:优先选 “与反射光线夹角最小” 或 “距离反射光线最近” 的点(Karis 改进后更高效);
- 能量修正:通过简单公式缩放光线强度,保证能量守恒。
- 优缺点:推导简单、适用于多种光源形状;但会导致粗糙表面的高光偏 “尖锐”(与真实值有偏差),需额外优化。
- 扩展优化:Iwanicki 和 Pesce 通过拟合数值积分结果,引入软阈值、缩放因子等参数;de Carpentier 针对微表面 BRDF,改用 “最大化$(\mathbf{n} \cdot \mathbf{h})$(法线与半向量点积)” 选择代表性点,优化掠射角下的高光形状。
线性变换余弦(LTC)法:高精度通用解决方案
- 核心逻辑:用 “3×3 矩阵变换的余弦波瓣”(LTC)近似任意 BRDF 的镜面波瓣,通过矩阵对余弦波瓣进行缩放、拉伸、旋转,适配不同 BRDF 和光源形状;再利用逆矩阵变换积分定义域,将复杂积分转化为简单余弦波瓣的积分(可复用成熟算法)。
- 关键优势:
- 通用性强:适用于任意纹理多边形面光源(卡片、圆盘、管状等)和一般 BRDF;
- 准确性高:离线构建 BRDF 参数(粗糙度、入射角)的查找表,实时通过查找表快速求解。
- 缺点:计算成本高于前两种方法,但准确性更优。
一般光源形状的适配的处理
| 光源形状 | 适用场景 | 关键处理方式 |
|---|---|---|
| 球形光源 | 基础简化光源 | 粗糙度修正、代表性点技术(核心适配对象) |
| 管状(胶囊)光源 | 模拟荧光灯管 | Lambertian 表面可用 Picott 的封闭积分解;非 Lambertian 表面用代表性点技术叠加点光源 |
| 平面光源(卡片 / 圆盘 / 多边形) | 柔光箱、反光板、发光面板等 | - 简单近似:Drobot 的代表性点方法(找积分最大值附近的点);- 精确解析:Arvo 的辐照度张量 + 轮廓积分(实时成本高);- 实用优化:Lecocq 的 O (1) 轮廓积分近似 |
环境光照
在实践中,通常我们会认为直接光具有较高的radiance和相对较小的立体角,而间接光往往会以中等或者较低的radiance,来覆盖半球方向上的其余部分。基于这种划分方式和理由,我们可以将二者分开进行处理。
恒定环境光
-
核心假设:入射辐射度 $L_A$ 不随方向变化(全方向恒定),是最基础的环境光照模型。
对不同表面的贡献
- Lambertian(漫反射)表面
- 特点:出射辐射度贡献恒定,与表面法线 $\mathbf{n}$ 和观察方向 $\mathbf{v}$ 无关。
- 公式:
- 简化逻辑: 漫反射的 BRDF 为 $\frac{\rho_{\mathrm{ss}}}{\pi}$,半球积分为 $\int_{\Omega} (\mathbf{n} \cdot \mathbf{l}) d\mathbf{l} = \pi$,因此最终 $\frac{\rho_{\mathrm{ss}}}{\pi} \cdot L_A \cdot \pi = \rho_{\mathrm{ss}} L_A$。
- 任意 BRDF 表面
- 特点:贡献依赖定向反照率 $R(\mathbf{v})$。
- 定向反照率定义:
- 出射辐射度公式:
- 老版本简化(近似方案)
- 假设:定向反照率 $R(\mathbf{v})$ 为恒定值(称为环境颜色 $\mathbf{c}_{\mathrm{amb}}$)。
- 公式:
球面函数和半球函数
把环境光照 $L_A$ 视为一个常数,这意味着:
每个方向来的光强都是相同的。
但真实世界中并非如此。一个点从不同方向接收到的光强往往不同,例如:
- 左边可能是红墙 → 红色光;
- 右边可能是绿树 → 绿色光;
- 上方可能被遮挡 → 几乎没有光。
因此,要描述这种“方向依赖的入射辐射度(radiance)”,我们需要一个定义在**方向空间(sphere)**上的函数。
我们把所有方向的集合记为:
$$ S = \{\omega \in \mathbb{R}^3 : ||\omega|| = 1\} $$于是,一个方向依赖的入射辐射度可以写为:
$$ L_i(\omega) : S \rightarrow \mathbb{R}^+ $$它表示从方向 $\omega$ 入射的 radiance。
这个函数定义在球面上(而非位置上),因此叫球面函数(spherical function)。
对于一个 Lambertian 表面,其出射辐射度与入射辐射度的关系是:
$$ L_o = \frac{\rho}{\pi} \int_{H(\mathbf{n})} L_i(\omega_i) (\mathbf{n} \cdot \omega_i) d\omega_i $$其中:
- $H(\mathbf{n})$:法线方向上的半球;
- $(\mathbf{n} \cdot \omega_i)$:余弦项;
- 这个积分就是radiance 与余弦波瓣的卷积。
因此,为了实时渲染,我们往往预计算:
$$ E(\mathbf{n}) = \int_{H(\mathbf{n})} L_i(\omega_i) (\mathbf{n} \cdot \omega_i) d\omega_i $$并把它称为 irradiance function,它是球面函数的卷积结果。预计算每个法线半球的irradiance。
球面函数是定义在球面上的连续函数,不可能直接存储。所以我们要找一种“基底”,用有限个系数表示它。这就类似于在平面上用傅立叶级数展开周期函数。
例如: $f(\omega) = \sum_{l,m} c_{lm} Y_{lm}(\omega)$, 其中 $Y_{lm}$ 是球谐函数(Spherical Harmonics)。
这类基底称为:
- 球面基底(Spherical Base)
- 包括球谐函数、Haar 小波基、径向基、环境高光基底(AHD)等。
投影(Projection): 把函数 $L_i(\omega)$ 投影到基底空间,求出系数:
$$ c_{lm} = \int_S L_i(\omega) Y_{lm}(\omega) d\omega $$重建(Reconstruction): 通过这些系数恢复函数:
$$ \tilde{L_i}(\omega) = \sum_{l,m} c_{lm} Y_{lm}(\omega) $$总结一下:一个定义在球面上的函数 $f(\omega)$,可以用一组球面基函数 $Y_l^m(\omega)$ 的线性组合来近似表示。 你只需要计算保存这些线性组合的系数,在任何方向上(角度)都可以通过这些系数 + 基函数重建出近似值。
球面基底的简单表示形式
- 表格(采样点)表示球面函数
- 方法:直接在球面上选若干方向 $\omega_i$,存储每个方向上的函数值 $f(\omega_i)$。
- 重建:当需要某个方向 $\omega$ 的值时,找到附近的样本点,用插值(如双线性或三线性)求出近似值。
- 优点:
- 非常直观,易于理解和实现;
- 表征能力强,只要采样足够密集,几乎可以精确还原原函数;
- 函数相加/相乘简单:直接对对应采样点的值相加或相乘。
- 缺点:
- 样本少时重建误差大;
- 旋转不变性差(函数旋转后,插值结果可能不准确,导致闪烁或脉动瑕疵);
- 高频函数需要大量样本,存储和计算量大;
- 卷积等操作复杂,计算成本和样本数量成正比。
-
环境立方体(Ambient Cube, AC)
- 思想:用 6 个值(立方体六个面)表示球面函数。
- 公式:
- $\mathbf{d}$ 是方向向量;
- $\mathbf{c}+$ 和 $\mathbf{c}-$ 是立方体六个面的值;
- $\operatorname{sel}_+$ 根据方向的正负性选择对应面。
- 特点:
- 只需三个波瓣参与计算(x、y、z方向);
- 在软件重建上可能比 GPU 双线性过滤更快;
- 精度低,但实现简单;
- 可以和球谐 SH 互相转换(Sloan 提供方法)。
-
环境骰子(Ambient Dice, AD):
- 基底由二十面体顶点方向上的平方和四次余弦波瓣组成;
- 需要存储 12 个值中的 6 个来重建;
- 重建质量比环境立方体高,但逻辑稍复杂。
球面基底
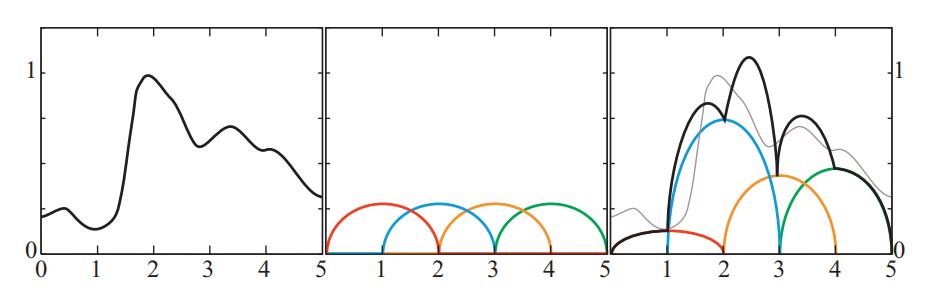
基函数的一个例子。在这个例子中,输入值为0-5之间的一个数,函数会返回0-1之间一个值,左侧的图展示了这样一个函数。中间的图展示了一组基函数(每种颜色都代表了一个不同的基函数)。右图则展示了使用基函数来对目标函数的近似,通过将每个基函数乘以一个权重并将它们相加来完成这个近似。右图中的每个基函数都按照各自的权重进行了缩放,图中的黑色线条代表了基函数求和之后的结果,这是对原始函数的近似结果;图中灰色线条代表了原始函数,用于和近似函数进行比较。
球面径向基函数(SRBF)
- 定义:一类沿轴旋转对称的函数,只依赖于 方向之间的夹角。
- 输入参数 = 方向 $\mathbf{v}$ 与波瓣方向 $\mathbf{d}$ 的夹角。
- 构建方法:
- 将球面覆盖上若干固定方向的“波瓣”(lobe);
- 每个波瓣有大小/尖锐度参数;
- 函数值 = 所有波瓣在该方向上的值加权求和。
- 优点:
- 可以获得比双线性插值更高质量的重建;
- 可通过固定波瓣方向,简化投影(只需拟合权重)。
球面高斯(SG, Spherical Gaussian)
- 定义:一种常用的 SRBF,类似 von Mises-Fisher 分布:
- $\mathbf{v}$:计算方向
- $\mathbf{d}$:波瓣主方向
- $\lambda$:尖锐度/扩散参数
- 球面函数表示:
- 通过拟合 $w_k$ 来最小化重建误差。
- 如果波瓣方向和扩散参数固定,投影成基就简单 → 线性最小二乘法。
- 如果方向/扩散参数可变 → 非线性优化,难度大。
球谐函数(spherical harmonic,SH)
球谐函数(spherical harmonic,SH)是球面上的一组正交的基函数。一组基函数的正交集(orthogonal set)具有如下特点:任意两个不同基函数之间的内积(inner product)为零。内积是一个类似于点积的概念。两个向量之间的内积就是它们的点积,即各个分量对应相乘再相加的结果。我们可以类似地推导出两个函数的内积的定义,即将这两个函数相乘再进行积分,其数学表达如下:
$$ \left\langle f_{i}(\mathbf{n}), f_{j}(\mathbf{n})\right\rangle \equiv \int_{\mathbf{n} \in \Theta} f_{i}(\mathbf{n}) f_{j}(\mathbf{n}) d \mathbf{n} $$下面说的是为了说明什么是标准正交基,以及他的优势对比普通基底
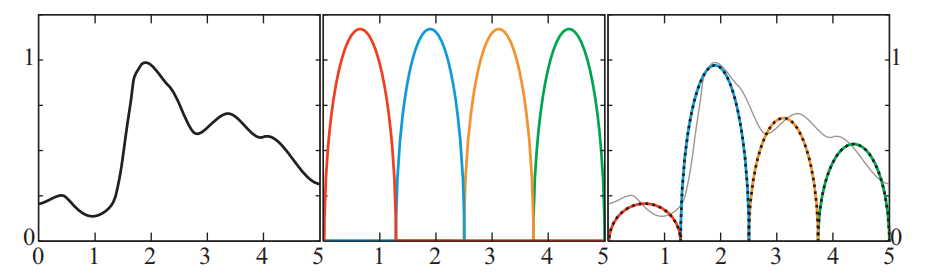
标准正交集(orthonormal set)也是一个正交集,其附加条件是该集合中的任意一个函数与自身的内积都为1。更加正式的表述方式为,一组函数${f_j()}$是标准正交的条件是:
$$ \left\langle f_{i}(), f_{j}()\right\rangle=\left\{\begin{array}{ll}0, & \text { where } i \neq j, \\ 1, & \text { where } i=j .\end{array}\right. $$展示了一个类似于图10.18的例子,不同之处在于,其中的基函数都是标准正交的。请注意,图10.20中的所展示的标准正交基函数都是互不重叠的,这个条件对于非负函数的标准正交集合是十分必要的,因为任何的重叠都意味着内积非零。而对于那些在部分范围内为负的基函数,则可以发生重叠,它们仍然可以形成标准正交集。这种重叠通常会得到更好的近似结果,因为它允许使用更加平滑的基底。而那些互不重叠的基函数,往往会导致近似结果的不连续性。
标准正交基的优点在于,想要找到最接近目标函数的近似值十分简单。为了完成投影操作,每个基函数的权重系数都是目标函数$f_{\text {target }}() $与相应基函数的内积:
$$ \begin{array}{c}k_{j}=\left\langle f_{\text {target }}(), f_{j}()\right\rangle, \\[2mm] f_{\text {target }}() \approx \sum_{j=1}^{n} k_{j} f_{j}() .\end{array} \tag{10.23} $$SH的基
SH 的特点
- 旋转不变性:
- 基函数在旋转下有解析变换公式,旋转投影函数方便。
- 计算成本低:
- 基函数是 $x, y, z$ 坐标的多项式。
- 全局支持:
- 类似球面高斯,每个基函数影响球面上所有方向。
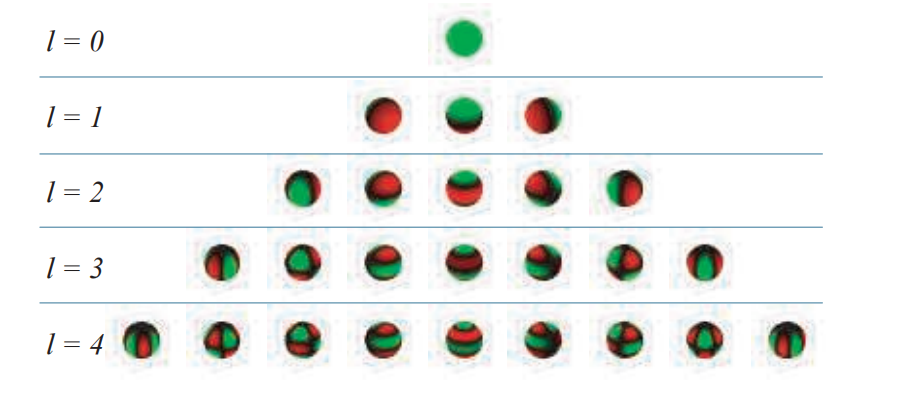
- 频带排列:
- 第 0 频带:常数函数
- 第 1 频带:线性函数
- 第 2 频带:二次函数
- … → 低频分量变化慢,高频分量变化快
- 光照积分等低频函数可以用少量系数表示(比如 irradiance)。
- 积分和乘积解析:
- 两个函数在球面上的积分可以转化为它们系数的点积 → 高效计算光照积分。
其他球面表示方法
除了 SH,还有:
| 方法 | 特点 | 用途 |
|---|---|---|
| 线性变换余弦(LTC) | 近似 BRDF | 高效积分 |
| 球面小波(spherical wavelet) | 空间局部性 + 频率局部性 | 高频函数压缩 |
| 球面分段常数基函数 | 球面划分为常数区域 | 环境光照表示 |
| 双聚类近似(biclustering) | 矩阵分解方法 | 环境光照压缩 |
半球基底
为什么要用半球基底
- 上节讲的 SH、球面高斯等基底都是定义在 整个球面 上。
- 但是很多光照相关函数 天然只定义在半球(例如 BRDF、入射辐照度、到达表面的光照),另一半球(向下)是零。
- 如果用全球基底来表示半球函数,会 浪费一半的表示能力。
- 因此研究者提出了 直接在半球域上构造的基底。
AHD基底
最简单的半球表示方法:
- A:恒定环境光
- H:高光方向光
- D:入射光集中的方向
存储:
- 8 个参数(2 个角度 + 6 个 RGB 颜色)
投影:
- 非线性 → 通常先投影到 SH,再用最优方向确定余弦波瓣方向 → 最小二乘求权重
用途:
-
表面 irrandiance 存储
-
游戏应用:《雷神之锤3》《使命召唤》
半条命2基底(Radiosity Normal Mapping)
- 用 3 个 互相垂直的基向量表示半球函数
- 基向量在切线空间中:
- 重建公式:
- 优化后可简化为线性加权形式:
- 特点:
- 存储少、计算快
- 可与法线贴图结合
- 实际效果优于低阶 SH
半球谐波 / H-Basis
将 SH 特化到半球域:
- 半球谐波(HSH):类似 SH,但只定义在半球
- 可以使用 Zernike 多项式(单位圆盘上的正交函数)来表示半球函数
H-Basis(Habel):
- 混合部分球谐函数 + HSH
- 正交
- 计算效率较高
- 可以对系数向量进行矩阵运算完成旋转
环境映射
将一个球面函数记录在一个或者多个图像中的做法,被称为环境映射(environment mapping)
经纬度映射
就是把环境光贴图表达为经纬度采样,计算要采样方向的经纬度,去对应位置读取
起源:1976年,Blinn 和 Newell 实现了第一个环境映射算法。
原理:
-
把球面上的环境信息“展开”到二维纹理。
-
类似地球上的经纬度系统:
- $\phi$(经度) → $[-π, π]$
- $\rho$(纬度) → $[0, π]$
-
将反射向量 $\mathbf{r} = (r_x, r_y, r_z)$ 转换为球坐标:
$$ \rho = \arccos(r_z), \quad \phi = \text{atan2}(r_y, r_x) \quad \text{(10.30)} $$ -
用 $(\rho, \phi)$ 来访问纹理,获取环境颜色。
注意:
- 纬度-经度映射 ≠ Mercator 投影:
- 纬度-经度映射保持纬度线之间的距离恒定。
- Mercator 投影在两极会极度拉伸。
球面映射
球面映射把环境光照记录在一个圆形纹理图像中,就像在一个完全反射的球体上看到环境一样。这个纹理也称为光照探针(light probe),因为它捕捉了球体位置处的光照。
计算流程
-
固定观察向量 $\mathbf{v} = (0,0,1)$: 球面贴图是在一个固定视角下拍摄或者生成的,反映了这个方向的环境信息。
-
求半角向量 $\mathbf{n}$: 反射观察向量 $\mathbf{r}$ 和原始观察向量 $\mathbf{v}$ 的和:
$$ \mathbf{n} = \frac{(r_x, r_y, r_z + 1)}{\sqrt{r_x^2 + r_y^2 + (r_z + 1)^2}} $$ -
映射到纹理坐标 $(u,v)$:
$$ u = \frac{r_x}{2 m} + 0.5, \quad v = \frac{r_y}{2 m} + 0.5 $$- 这里 $m = \sqrt{r_x^2 + r_y^2 + (r_z + 1)^2}$
- 将 $[-1,1]$ 范围映射到 $[0,1]$
-
纹理查找:
- 使用 $(u,v)$ 在球面贴图中查找对应的入射辐射 $L_i(\mathbf{r})$
立方体映射
将环境投影到以相机位置为中心的立方体六个面上,每个面90° FOV。
六张正方形纹理分别对应立方体的 +X、-X、+Y、-Y、+Z、-Z。
访问纹理时,直接用方向向量 $\mathbf{r}$ 指向哪个面,再根据面内坐标取值即可。 这个在LearnOpenGL中实现过

基于图像的高光照明
这里讲的就是LearnOpenGL的IBL实现,高光就是反射的一个范围内都能接收到
环境映射最初是作为一种镜面渲染技术发展起来的,但是也可以将它扩展到光泽(glossy)反射中。当用于模拟无限远处光源的镜面效果时,这样的环境贴图也被称为高光探针(specular light probe)。(这里的镜面反射就是只有反射方向的颜色,光泽反射就是反射的一个范围内都能接收到)
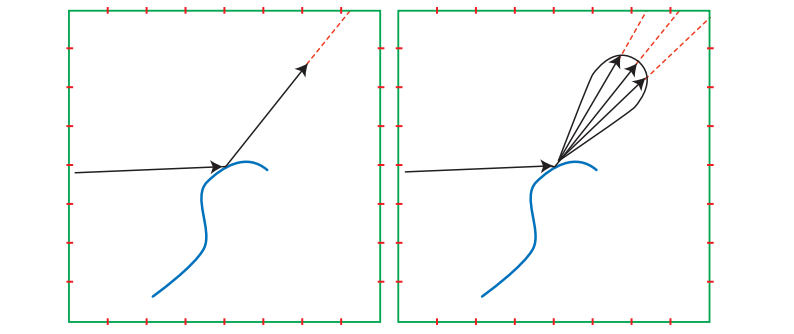
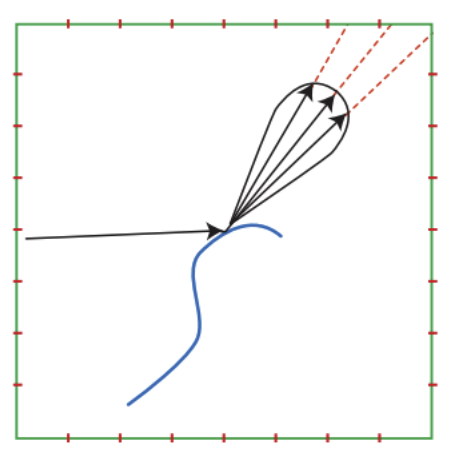
先解释一下lobe是什么,lobe说的都是BRDF的lobe
-
对于一个 给定的入射方向 $\mathbf{l}$,BRDF $f_r(\mathbf{l}, \mathbf{v})$ 会定义出 所有出射方向 $\mathbf{v}$ 上的反射强度。
-
**波瓣(lobe)**就是指这个方向空间中 反射值显著非零的区域。
- 理想镜面 → 波瓣无限尖锐,只在反射方向上非零。
- 光泽表面 → 波瓣稍宽,附近方向也有非零反射。
- 漫反射 → 波瓣非常宽,几乎整个半球都有非零反射。
下图展示镜面和高光的区别
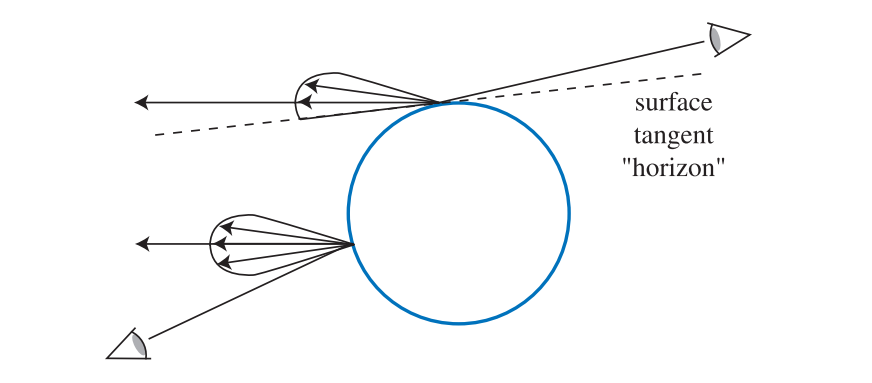
径向对称的镜面波瓣:反射方向在lobe中心
径向对称的镜面波瓣是一种渲染的假设,但会存在地平线裁剪问题
对于上边这种情况,观察球的表面时lobe会被地平线裁剪,这时候经径向对称的镜面波瓣假设是错的,会让表面高光过亮
环境贴图 + mipmap 模拟粗糙度
- Heidrich 和 Seidel 方法:用一个环境贴图来模拟表面模糊反射。
- 粗糙度的处理:
- 环境立方体贴图生成多级 mipmap。
- 低级别 mipmap:高分辨率,对应光滑表面(高光尖锐)。
- 高级别 mipmap:低分辨率,对应粗糙表面(高光模糊)。
- 渲染时,通过 反射向量索引贴图 并选择对应 mipmap 层,实现不同粗糙度的反射。
图10.36显示了不同粗糙度波瓣对应的 mipmap 层级及渲染结果。
卷积环境贴图
想要生成预过滤的环境贴图意味着,要对与方向$\mathbf{v}$相关的每个纹素上,计算环境radiance与镜面波瓣$D$的积分:
$$ \int_{\Omega} D(\mathbf{l}, \mathbf{v}) L_{i}(\mathbf{l}) d \mathbf{l}. $$这个积分是一个球面卷积(spherical convolution),由于其中的$L_i$只能通过环境贴图的表格形式获得,因此这个积分通常无法解析求解,只能通过数值方法进行求解。一种流行的数值方法是采用蒙特卡罗方法:
$$ \int_{\Omega} D(\mathbf{l}, \mathbf{v}) L_{i}(\mathbf{l}) d \mathbf{l} \approx \lim _{N \rightarrow \infty} \frac{1}{N} \sum_{k=1}^{N} \frac{D\left(\mathbf{l}_{k}, \mathbf{v}\right) L_{i}\left(\mathbf{l}_{k}\right)}{p\left(\mathbf{l}_{k}, \mathbf{v}\right)} \tag{10.36} $$蒙特卡罗积分
-
通过随机采样球面方向近似积分:
$$ \int_\Omega D(\mathbf{l}, \mathbf{v}) L_i(\mathbf{l}) \, d\mathbf{l} \approx \frac{1}{N} \sum_{k=1}^{N} \frac{D(\mathbf{l}_k, \mathbf{v}) L_i(\mathbf{l}_k)}{p(\mathbf{l}_k, \mathbf{v})} $$- $\mathbf{l}_k$ 是球面样本方向
- $p(\mathbf{l}_k, \mathbf{v})$ 是采样概率密度
-
问题:
- 高光波瓣很尖,很多样本 $D(\mathbf{l}_k, \mathbf{v})\approx 0$ → 浪费计算
- 第一级 mipmap(高分辨率,低粗糙度)尤其慢
重要性采样(Importance Sampling)
- 通过选择采样概率 $p(\mathbf{l}_k, \mathbf{v})$ 更贴近波瓣形状
- 减少无效样本,降低方差
- 可以结合 环境贴图的 radiance 分布 和镜面波瓣进一步优化
- 适合 离线渲染 或生成 ground-truth 数据
用锥形 / 区域采样降低方差
- 不用单点采样,而是用 锥形区域 样本代替一个方向
- 可以对应 mipmap 层级进行近似
- 会引入偏差,但显著降低样本数,甚至可以 GPU 实时计算
- 示例技术:
- McGuire 等人:实时近似卷积,通过混合不同 mipmap 层级来重建波瓣
- Hensley 等人:使用 SAT(前缀和)加速积分
- Kautz / Manson & Sloan:B 样条滤波生成 mipmap,提高精度与速度
缺点:
- 忽略了 shadowing-masking 和半向量菲涅尔。
- 仅适合粗略镜面近似或 Phong 模型。
- 会产生误差,如地平线裁剪或掠射角下波瓣尖锐变化
split-sum
- 改进:将镜面环境光积分拆分为两个部分:
- 环境光卷积:波瓣 $D$ 与环境光 $L_i$ 的积分,依赖于反射方向和粗糙度,可预计算到立方体贴图 mipmap。
- 半球定向反射率 $R_\text{spec}$:包含 BRDF 权重(菲涅尔、shadowing-masking),依赖于视角、粗糙度,可预计算到二维或三维查找表。
- 优势:
- 对任意微表面 BRDF 都适用,不只是 Phong。
- 运行时快速查表即可获得高光结果。
- 注意:
- 假设波瓣径向对称(仍会有误差)。
- 可以通过轻微调整查询方向来补偿半球裁剪误差。
不对称和各向异性波瓣
传统预过滤环境贴图的假设
- 早期方法(如 10.5.1)假设镜面波瓣是径向对称,仅依赖于反射向量。
- 这种方法在 Phong 或简单各向同性 BRDF 下有效。
- 波瓣的径向对称意味着:
- 波瓣围绕反射向量旋转时,形状不变。
- 高光大小只由粗糙度决定,与光线方向旋转无关。
微表面 BRDF 的复杂性
- 微表面 BRDF(如 GGX)是围绕半向量 $\mathbf{h}=(\mathbf{l}+\mathbf{v})/|\mathbf{l}+\mathbf{v}|$ 定义的。
- 半向量依赖入射方向 $\mathbf{l}$,环境光下 $\mathbf{l}$ 并不唯一。
- 因此即便各向同性,也无法满足反射向量径向对称。
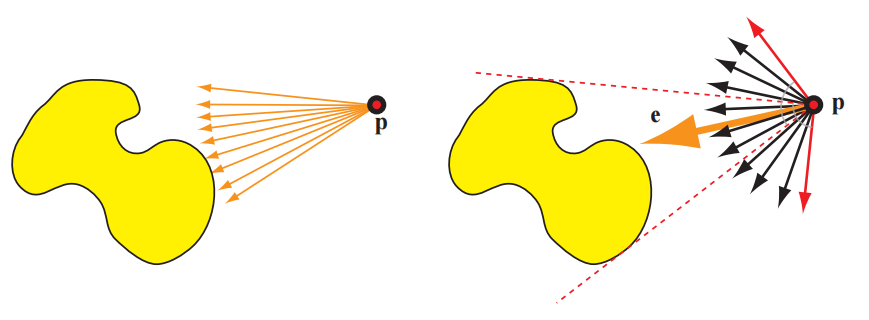
- 直接将微表面 BRDF 转换为径向对称波瓣会引入较大误差(高光形状偏离真实情况,尤其在掠射视角)。
- 图10.38 显示 GGX 原生波瓣(红) vs. 径向对称近似波瓣(绿),差异明显。
改进方法
-
Kautz & McCool:
- 使用单个最佳样本拟合 BRDF,而不是恒定修正因子。
- 对多个样本平均,近似半向量模型的拉伸高光。
- 引入能量修正因子,补偿径向对称近似的能量损失。
-
Iwanicki & Pesce:
- 对 GGX BRDF 做环境立方体贴图近似,利用 Nelder-Mead 最小化优化样本位置。
- 可以结合 GPU 各向异性过滤加速采样。
-
Revie / McAuley:
- 在延迟渲染和毛皮渲染中,调整单个样本位置以匹配复杂 BRDF 峰值。
-
McAllister / Lafortune BRDF:
- 利用 Lafortune BRDF(多个广义 Phong 波瓣叠加)表达复杂材质。
- 依然可以用传统预过滤环境贴图和 mipmap 编码不同 Phong 指数。
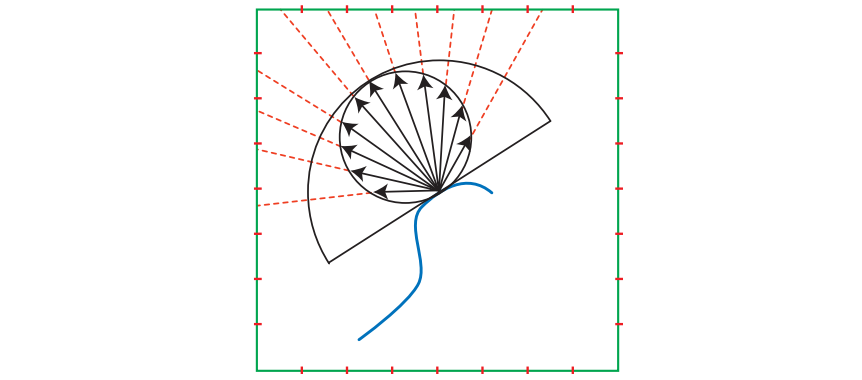
irradiance环境映射
上一小节中我们讨论了如何使用预过滤环境贴图来实现光泽反射,这些贴图同样也可以用于实现漫反射
计算irradiance环境贴图的过程。在原始环境纹理(本例中是一个立方体贴图)中对表面法线周围的余弦加权半球进行采样,并对采样结果进行求和,从而获得与视图无关的irradiance。图中绿色的方块代表了立方体贴图的横截面,红色的虚线代表了纹素之间的边界。这里使用的是一个立方体贴图,但实际上任何环境表示都是可以使用的。
球谐irradiance
漫反射光照低频:irradiance 随表面法线变化平滑,适合用低阶 SH 表示。
低阶 SH 足够:前 9 个系数(每个 RGB 通道)就能表示环境光,误差约 1%;间接光照甚至只需 4 个系数(12 个浮点数)。
卷积方法高效:
-
从 radiance 贴图计算 irradiance 实际上是与 clamped 余弦函数卷积。
-
卷积在 SH 空间中可通过系数相乘快速完成:
$$ k_{E j} = k_{\cos^+ j}' \, k_{L j} $$ -
$k_{L j}$ 是 radiance 的 SH 系数,$k_{\cos^+ j}’$ 是 clamped 余弦函数系数的缩放
紧凑:比立方体贴图或抛物线贴图节省存储。
高效:渲染时可通过多项式计算重建 irradiance,而无需纹理采样。
动态光源支持:
- 新光源的 SH 系数可以累加到已有 SH 系数中,无需重算整个贴图。
- 点光源、圆盘光源、球光源等均有解析 SH 表达式,可快速叠加。
其他方法
| 方法 | 特点 | 优缺点 |
|---|---|---|
| 半球光照(hemisphere lighting) | 使用天空颜色 $L_{sky}$ 和地面颜色 $L_{ground}$ 两种均匀radiance表示上半球和下半球 | 简单、存储少、计算快;精度低 |
| 环境立方体(ambient cube) | 将半球光照扩展为6个方向的立方体 | 较SH更直观,可用于快速计算;存储略大 |
| 球面高斯函数 | 对irradiance使用旋转对称的高斯函数表示 | 平滑,适合低频光照 |
| H-basis | 只能表示一个半球方向 | 有局限,法线向下时不可用 |
| SH(球谐函数) | 低频光照的紧凑表示,可做卷积、动态光源累加 | 高频光照不足,振铃现象存在 |