一些科普
Keyframe Animator
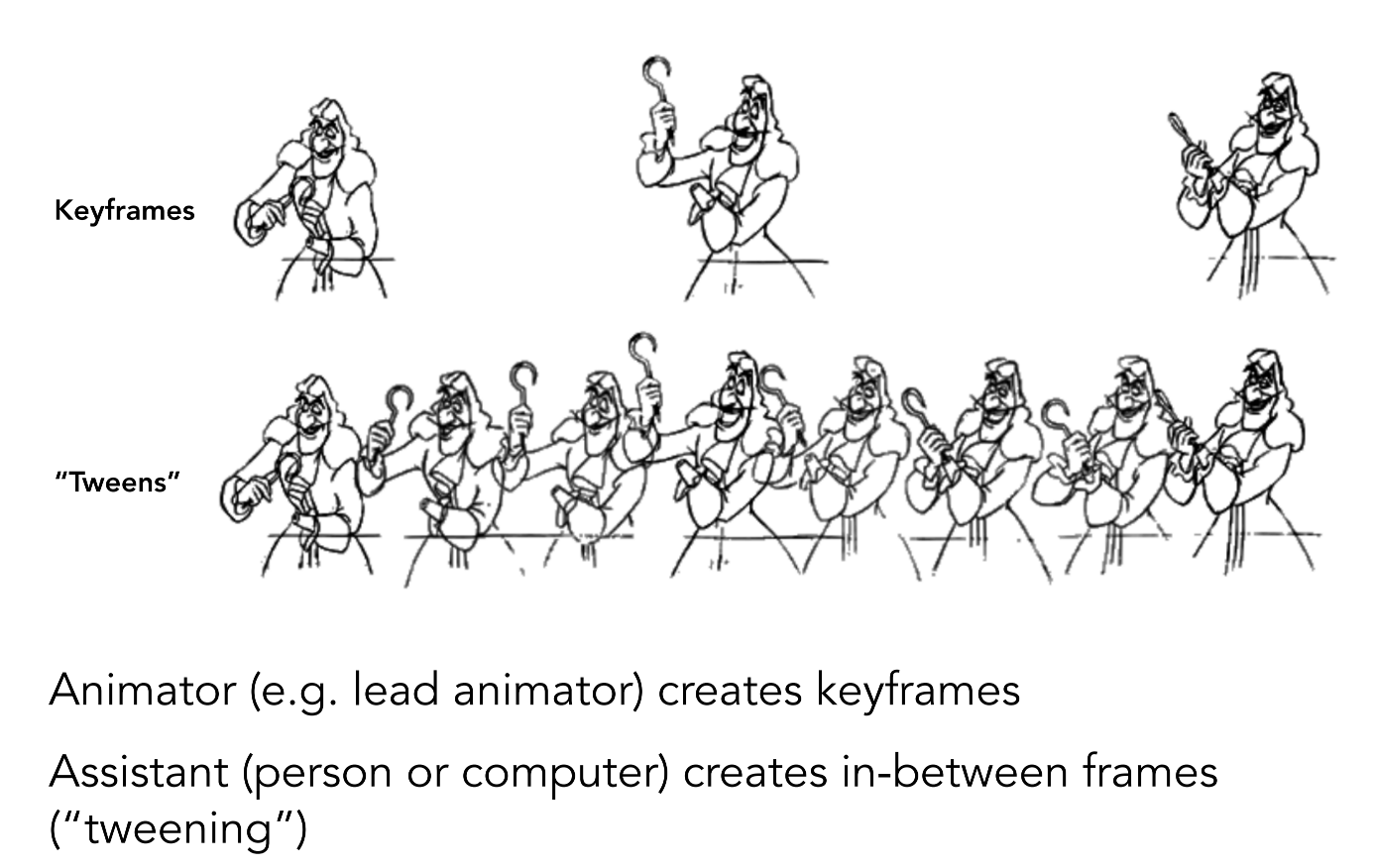
Physical Simulation
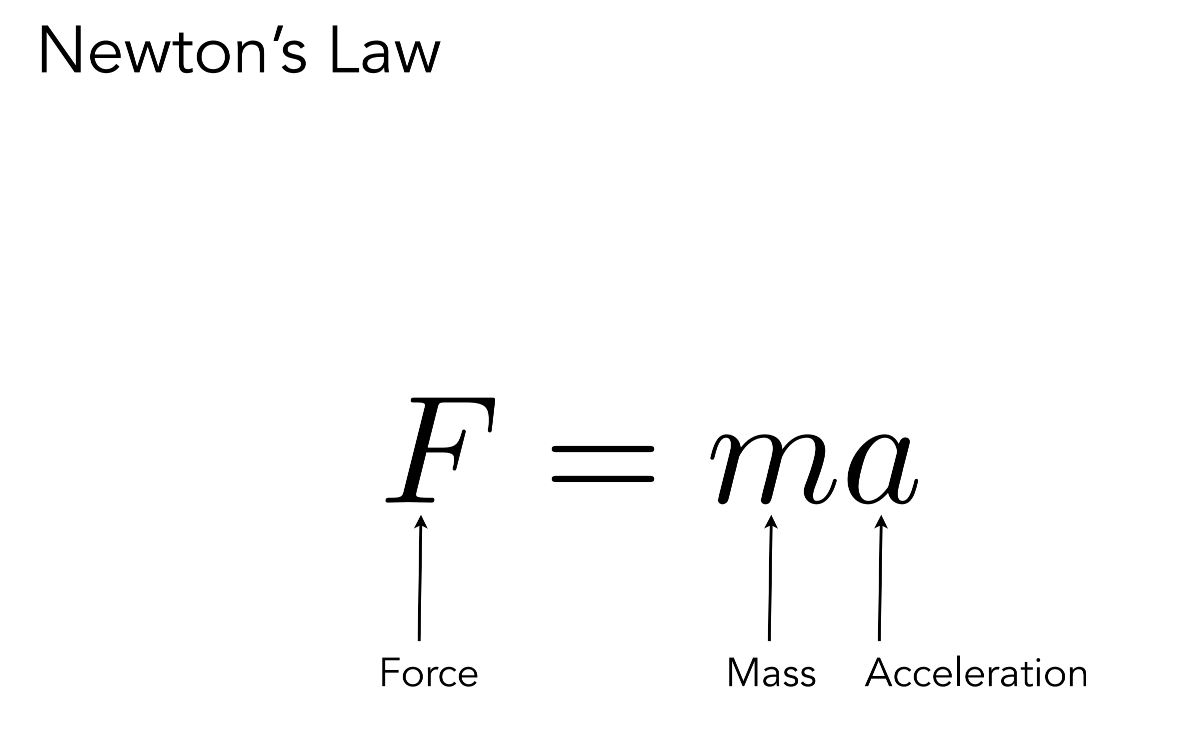
利用物理公式来模拟
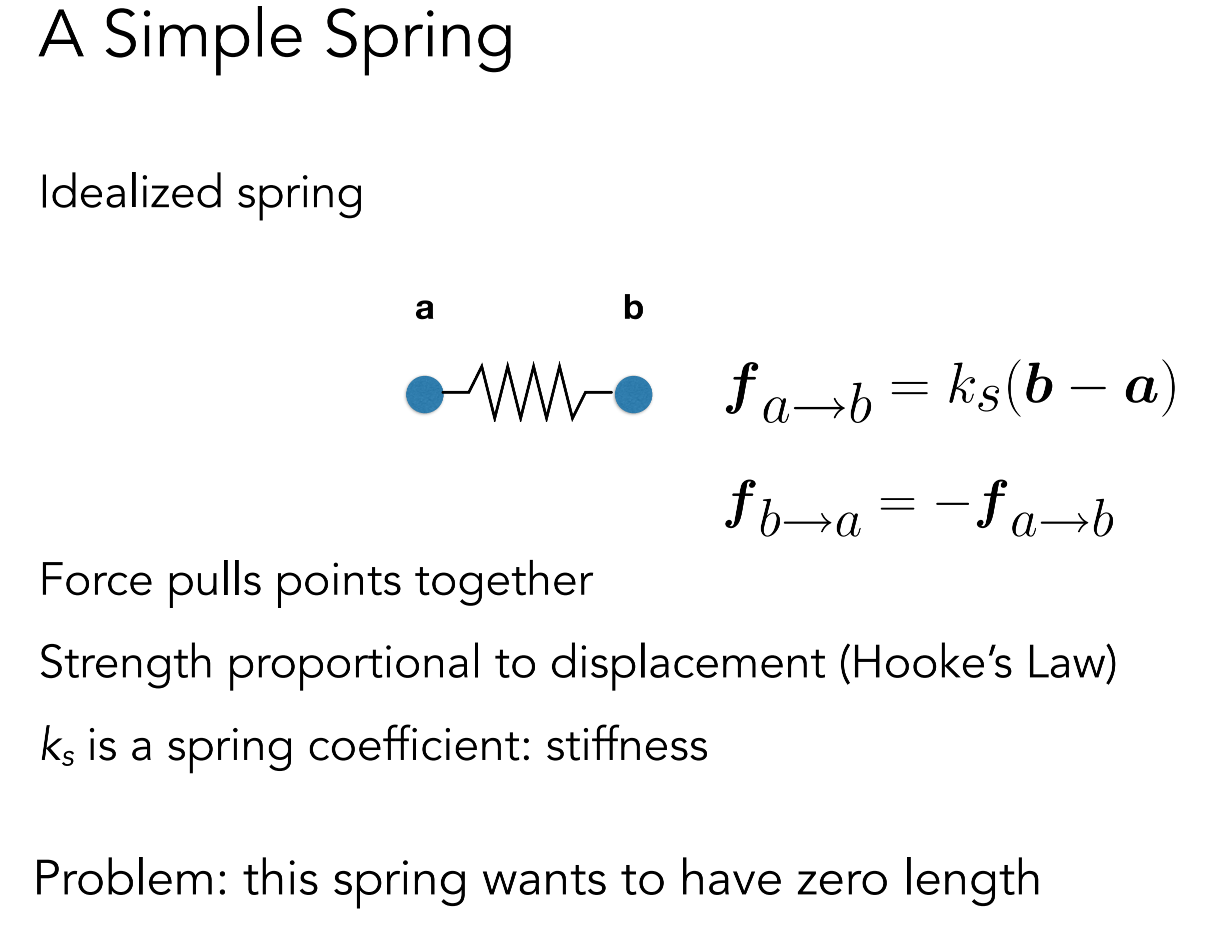
质点弹簧系统 Mass Spring Rope
下面开始描述这个系统
胡克定律描述弹簧或弹性体所受的回复力 F 与形变量 x 成正比, $k_s$是劲度系数,但是弹簧本身也有长度
 考虑弹簧原始长度 ,$\frac{b - a}{|b - a|}$这个向量用来表示方向,但问题是这样写,弹簧一旦拉开就不会不停的运动下去(动能和势能相互转化),所以还需要引入摩擦力
考虑弹簧原始长度 ,$\frac{b - a}{|b - a|}$这个向量用来表示方向,但问题是这样写,弹簧一旦拉开就不会不停的运动下去(动能和势能相互转化),所以还需要引入摩擦力
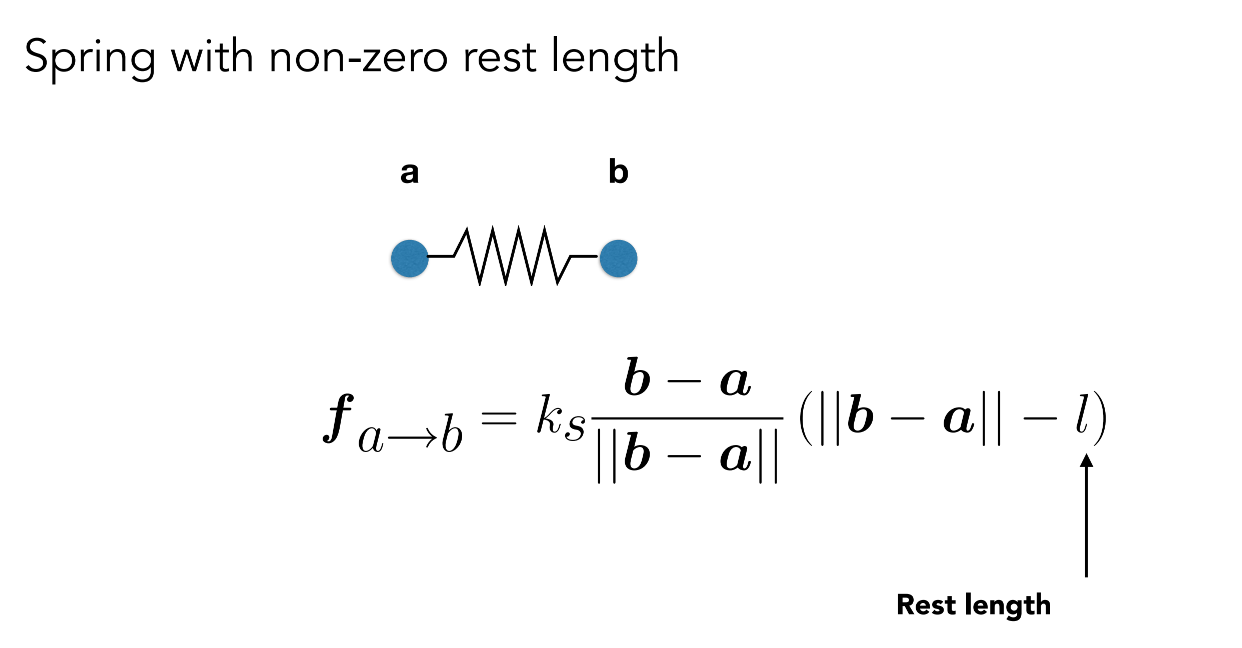 引入摩擦力之前先引入一些符号表示位置、速度、加速度
引入摩擦力之前先引入一些符号表示位置、速度、加速度
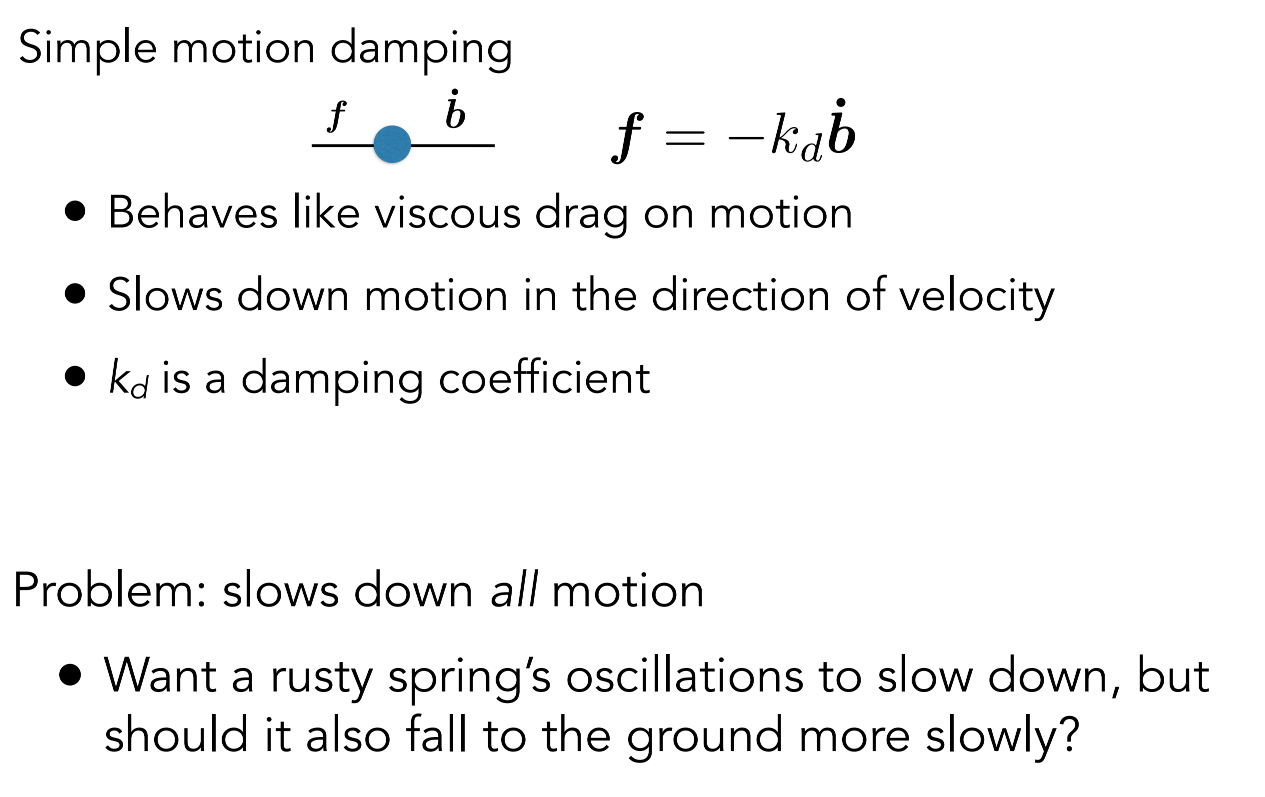
 给物体一个相反与速度方向的力,但还有问题,这样会导致所有的运动都停下来,假设AB两个物体同步向右走,他俩都有速度,但相对之间没有速度,所以应该没摩擦力,但是用下面的公式,只要物体有速度,就会受到摩擦力而停止
给物体一个相反与速度方向的力,但还有问题,这样会导致所有的运动都停下来,假设AB两个物体同步向右走,他俩都有速度,但相对之间没有速度,所以应该没摩擦力,但是用下面的公式,只要物体有速度,就会受到摩擦力而停止
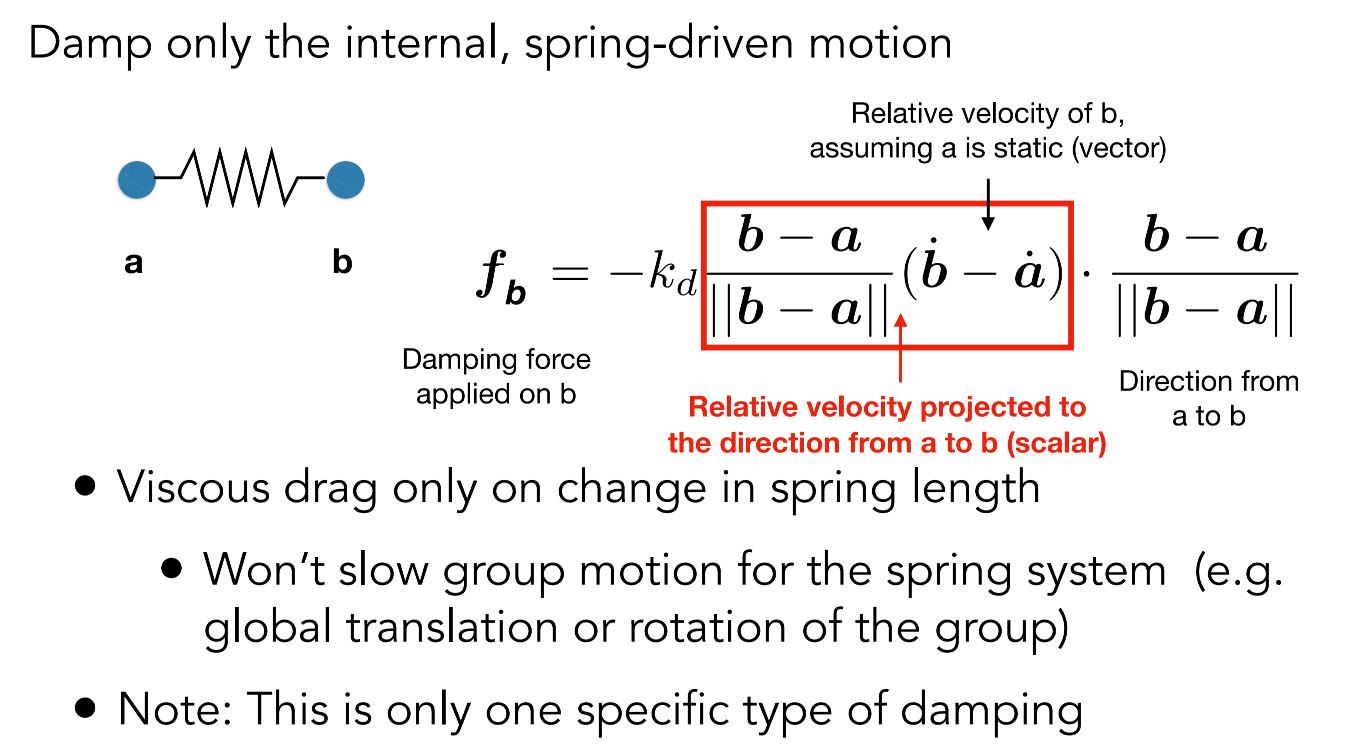
 我们在逐渐完善弹簧系统,摩擦力应该跟着物体AB的相对运动而产生,下图用两个物体速度差来表示相对速度,另外还需要考虑这个速度差是沿着弹簧方向才行,所以点乘$\frac{b - a}{|b - a|}$来投影到ba方向
我们在逐渐完善弹簧系统,摩擦力应该跟着物体AB的相对运动而产生,下图用两个物体速度差来表示相对速度,另外还需要考虑这个速度差是沿着弹簧方向才行,所以点乘$\frac{b - a}{|b - a|}$来投影到ba方向
 下面看一些弹簧结构
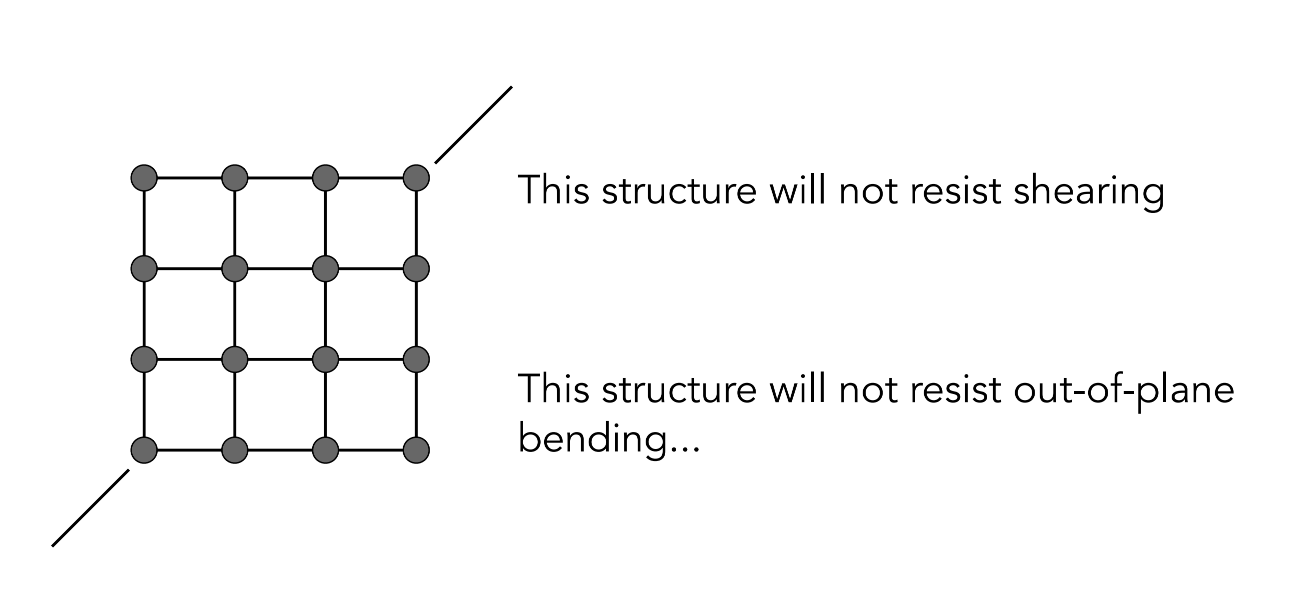
下面看一些弹簧结构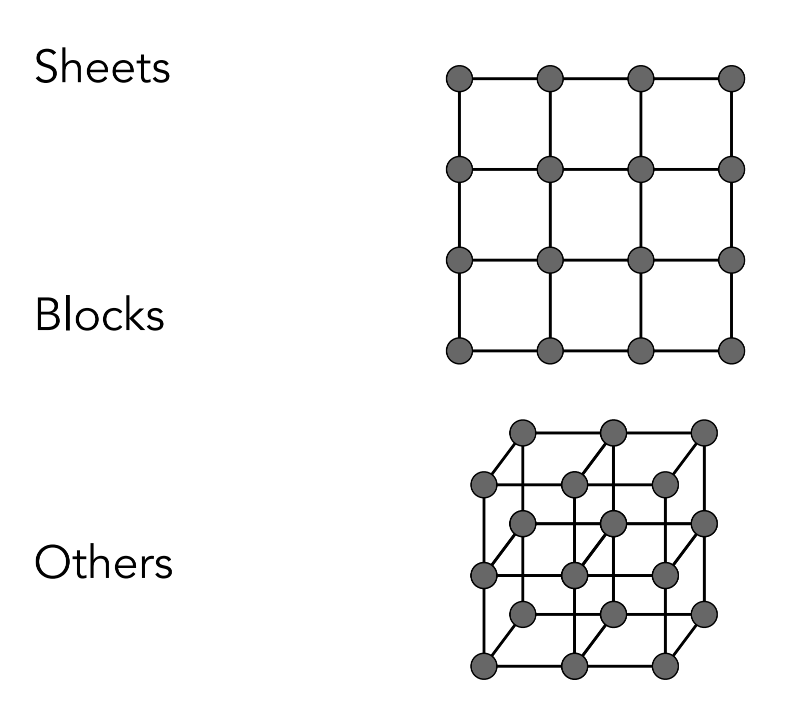 模型的行为是由结构连接来决定的,下面看如果一块布这样设计,很明显是不合理的,图中展示了2种原因(布可以抵抗切变力但这个结构不行,布会对抗对折)
模型的行为是由结构连接来决定的,下面看如果一块布这样设计,很明显是不合理的,图中展示了2种原因(布可以抵抗切变力但这个结构不行,布会对抗对折)
 先来改进切变,加入蓝色弹簧来抵抗
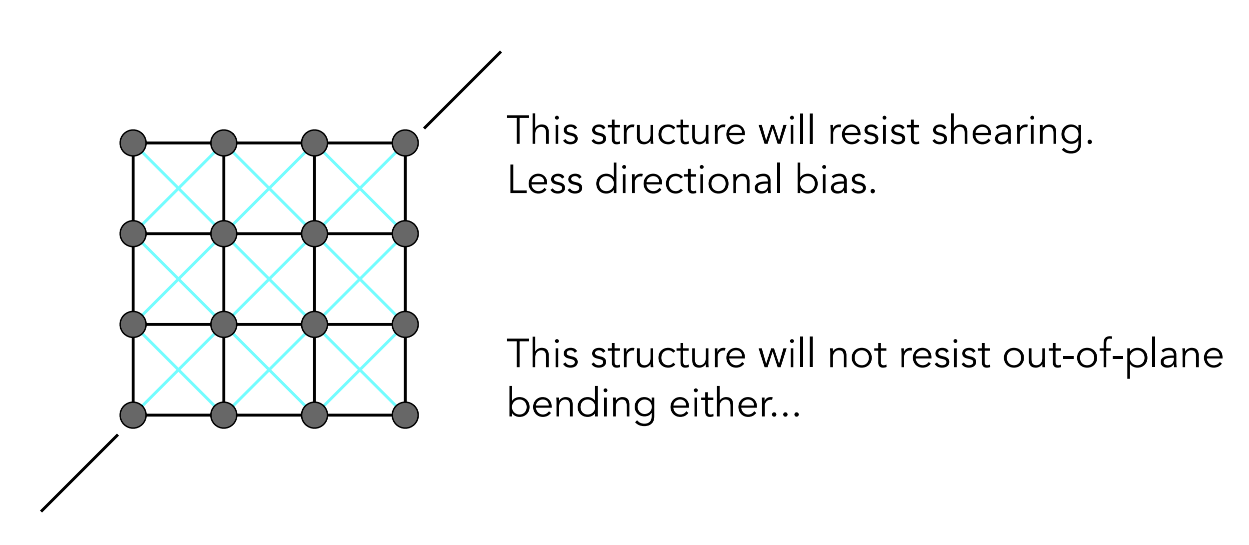
先来改进切变,加入蓝色弹簧来抵抗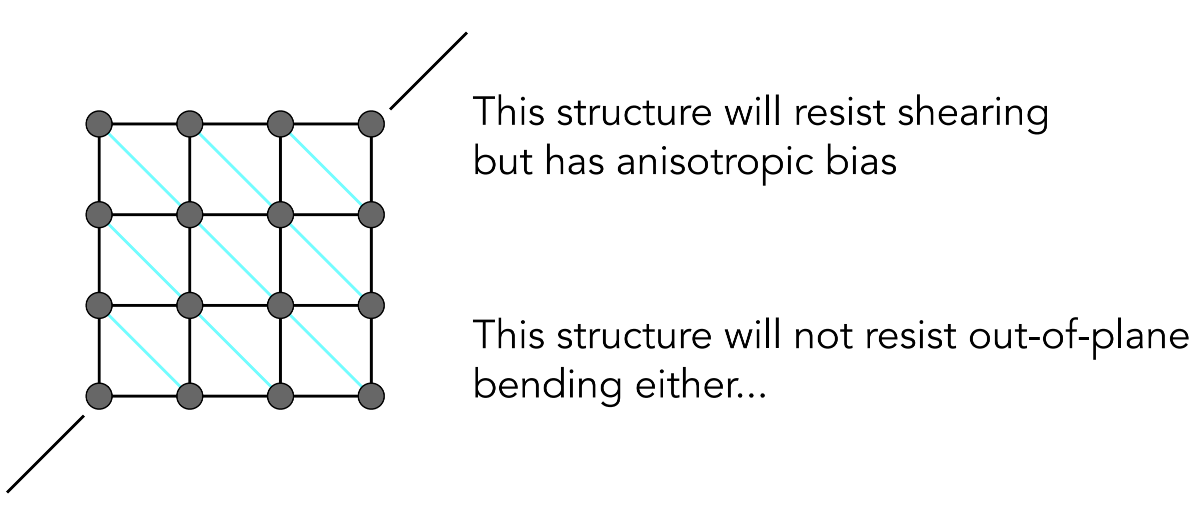 再加另外一个方向,但不能解决第二个问题
再加另外一个方向,但不能解决第二个问题
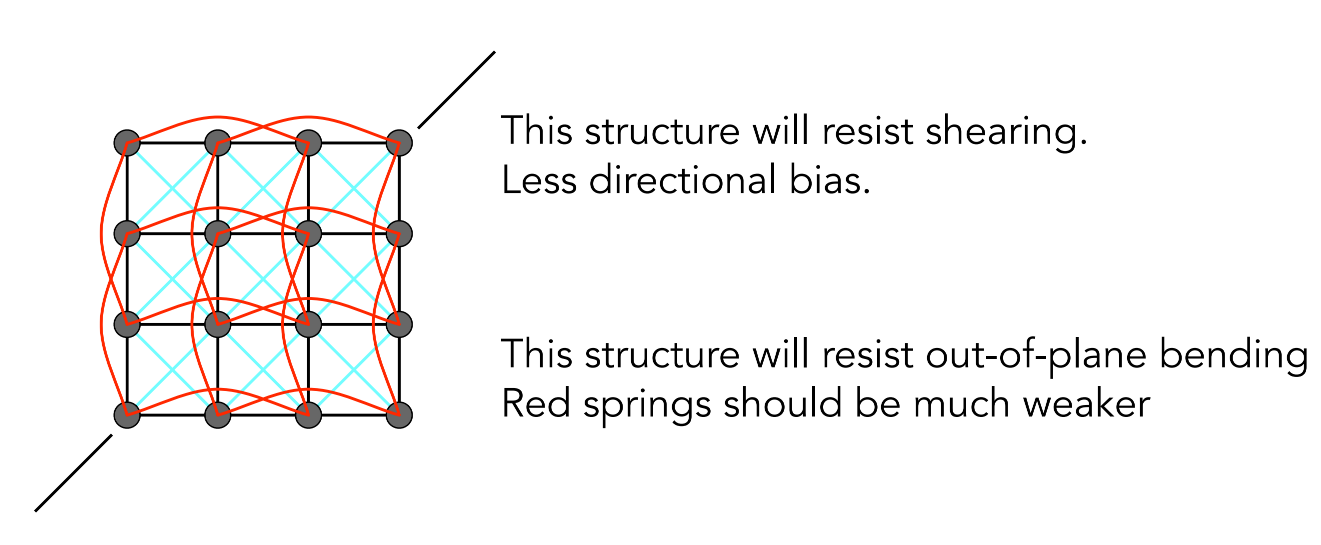
 最终版
最终版
粒子系统
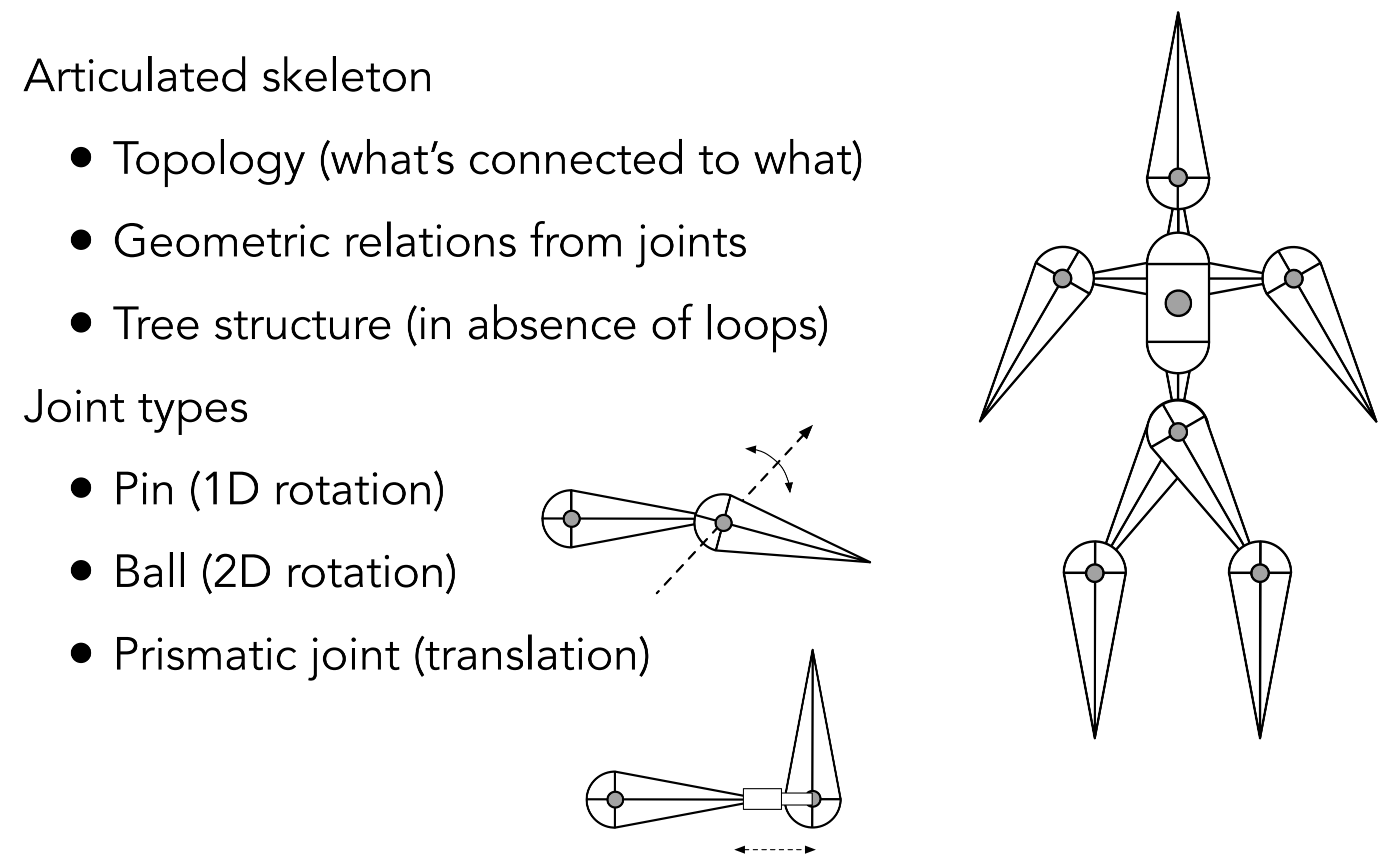
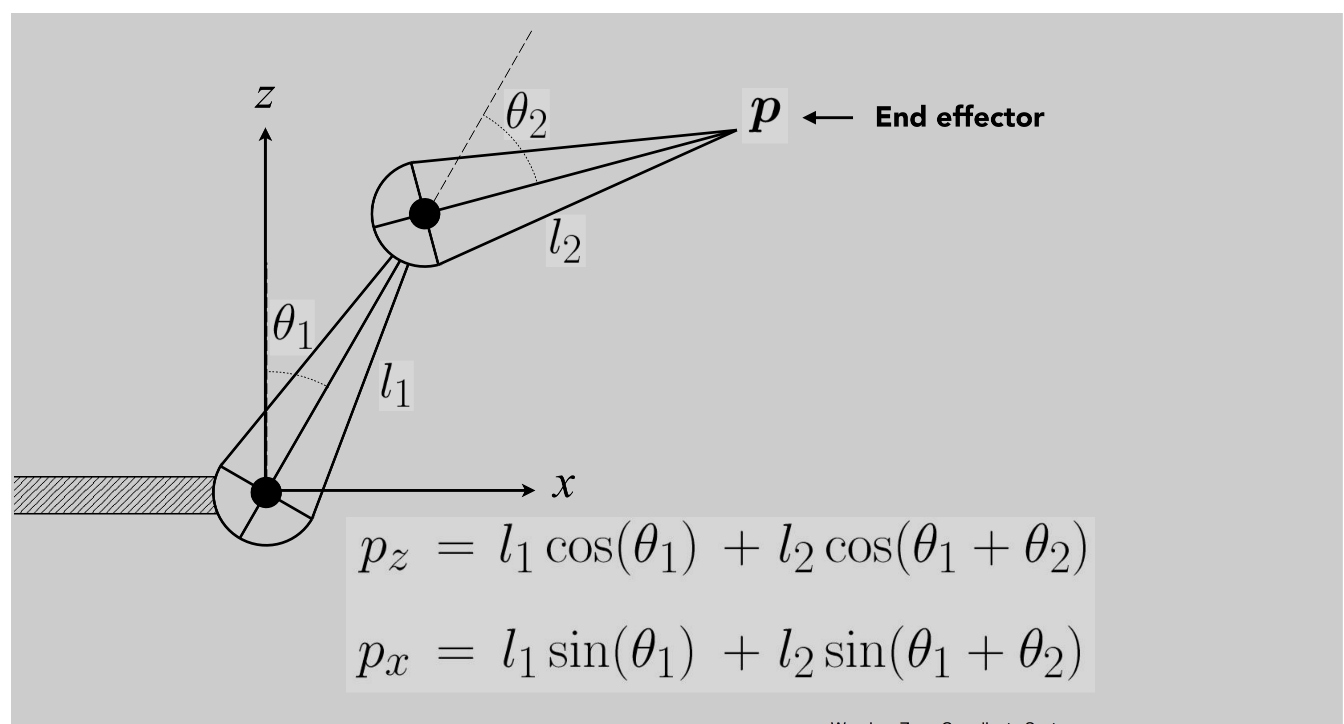
运动学 Forward Kinematics
 已知角度求P的位置
已知角度求P的位置
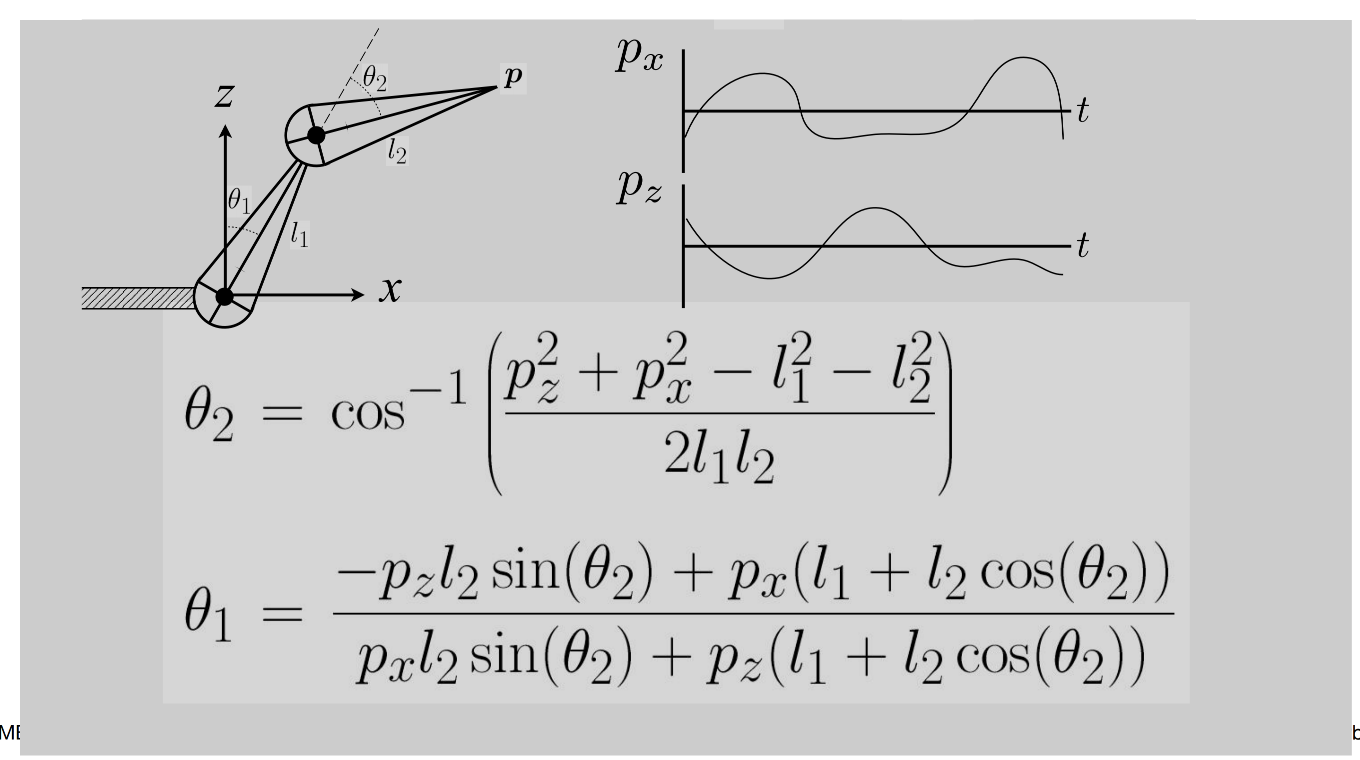
逆运动学Inverse Kinematics
已知P的位置求角度
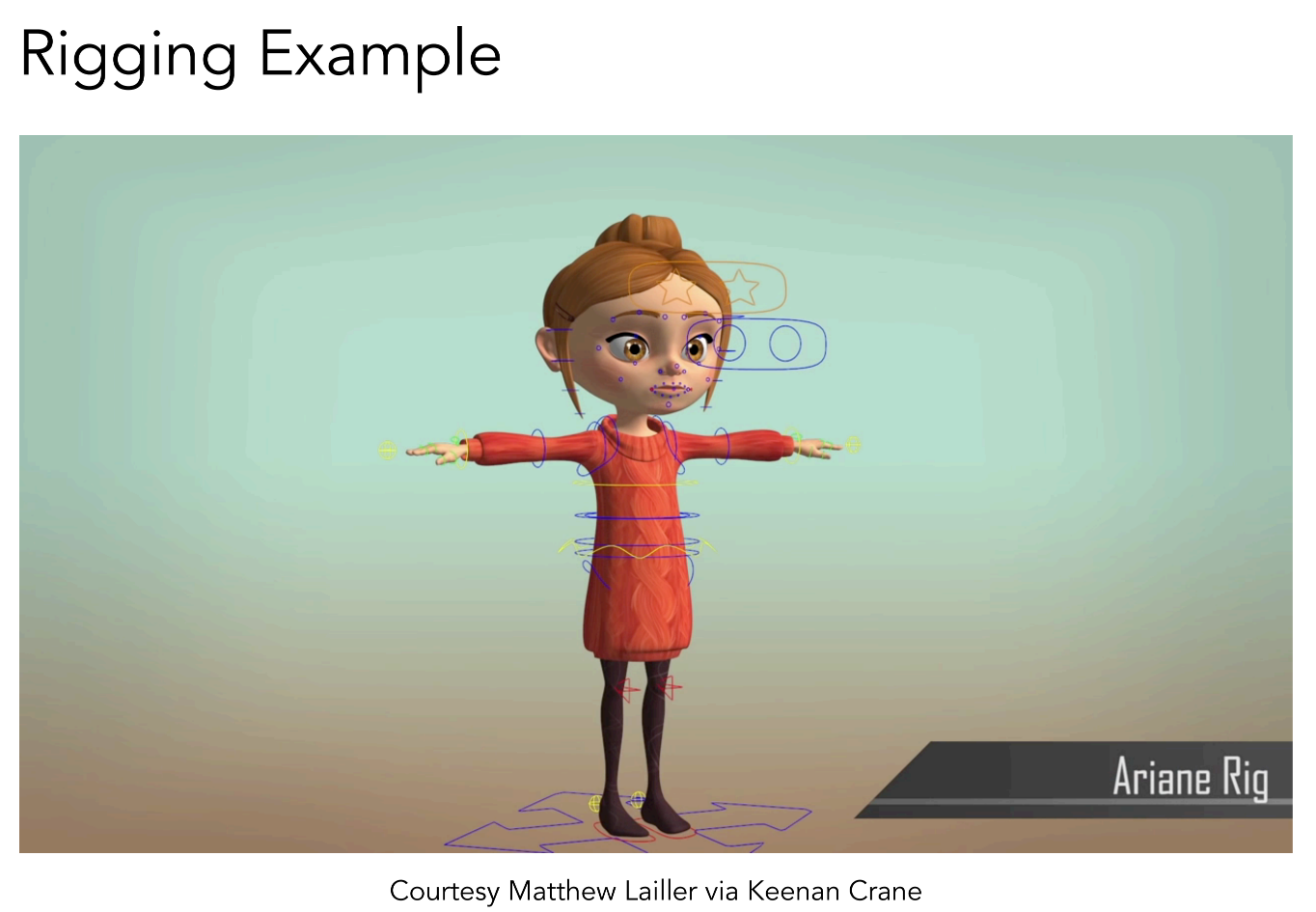
Rigging
Motion Capture
第二次课 cont.
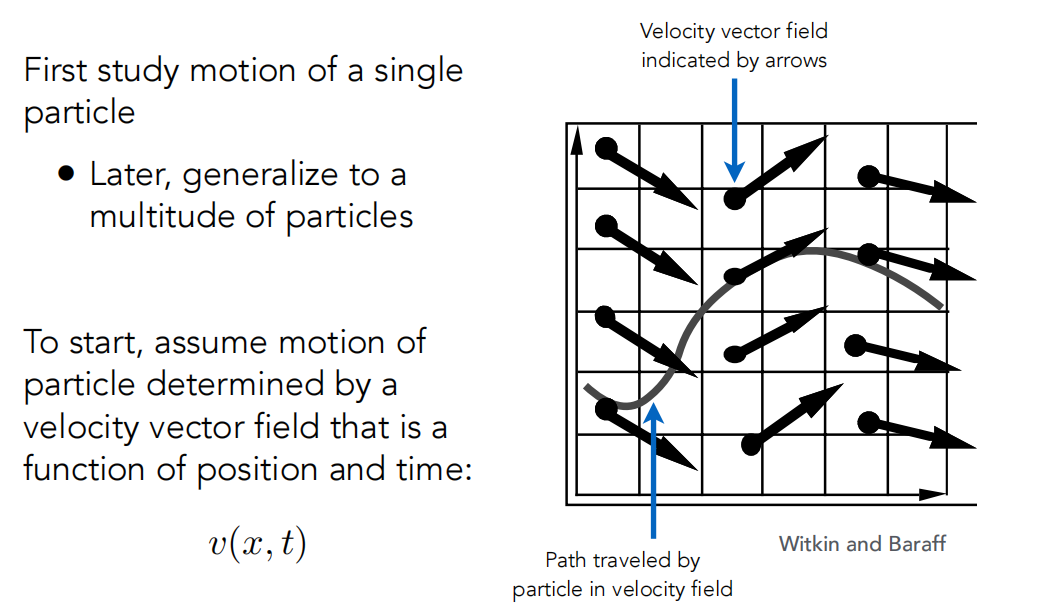
Single Particle Simulation
首先学习单粒子运动,假设粒子的运动由一个速度向量场决定,速度向量场的速度由位置和时间决定
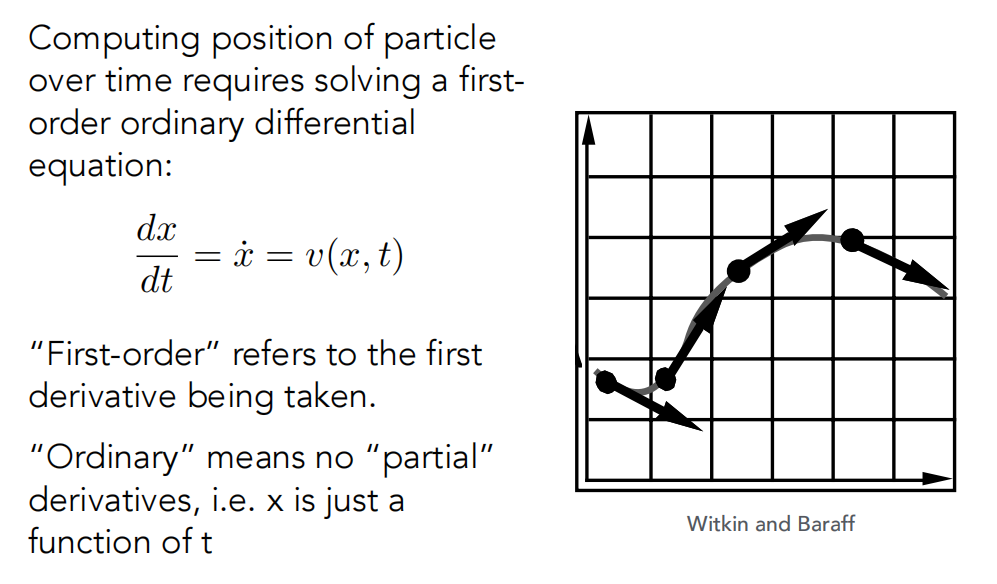
 要计算粒子在某个时间的位置,需要解下图所示的常微分方程
要计算粒子在某个时间的位置,需要解下图所示的常微分方程
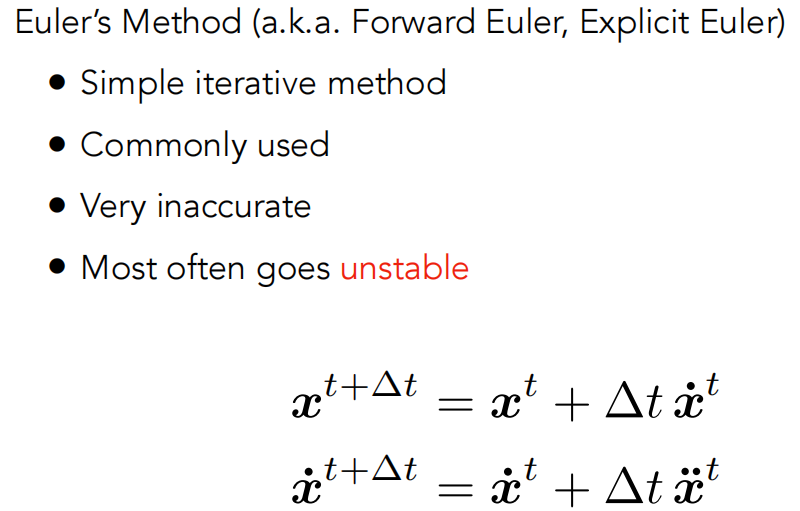
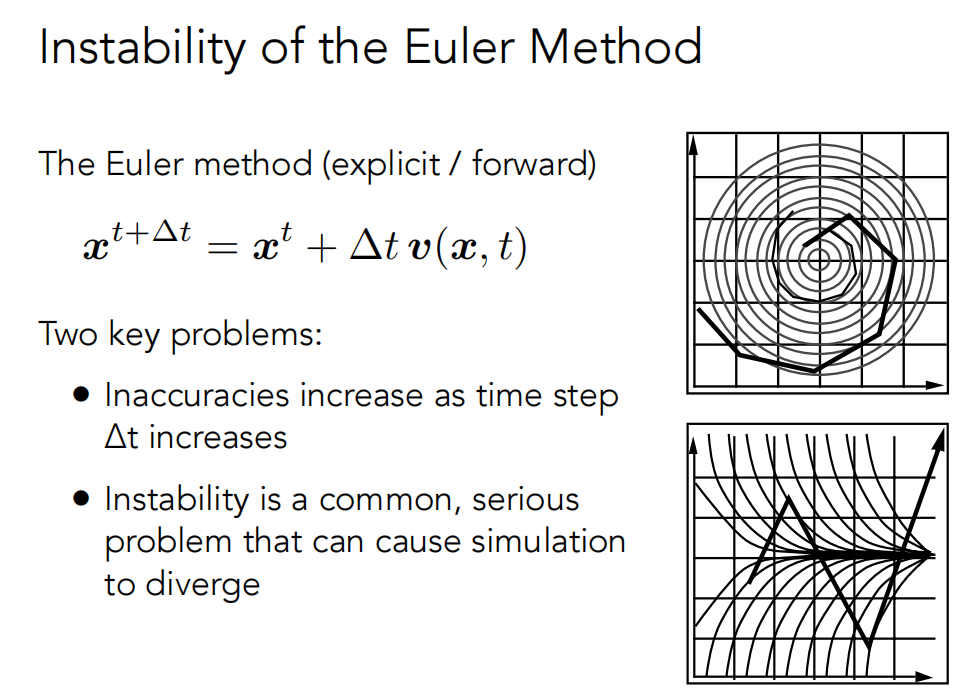
 用欧拉公式来解微分方程,用上一步的数据来计算下一步的位置
用欧拉公式来解微分方程,用上一步的数据来计算下一步的位置
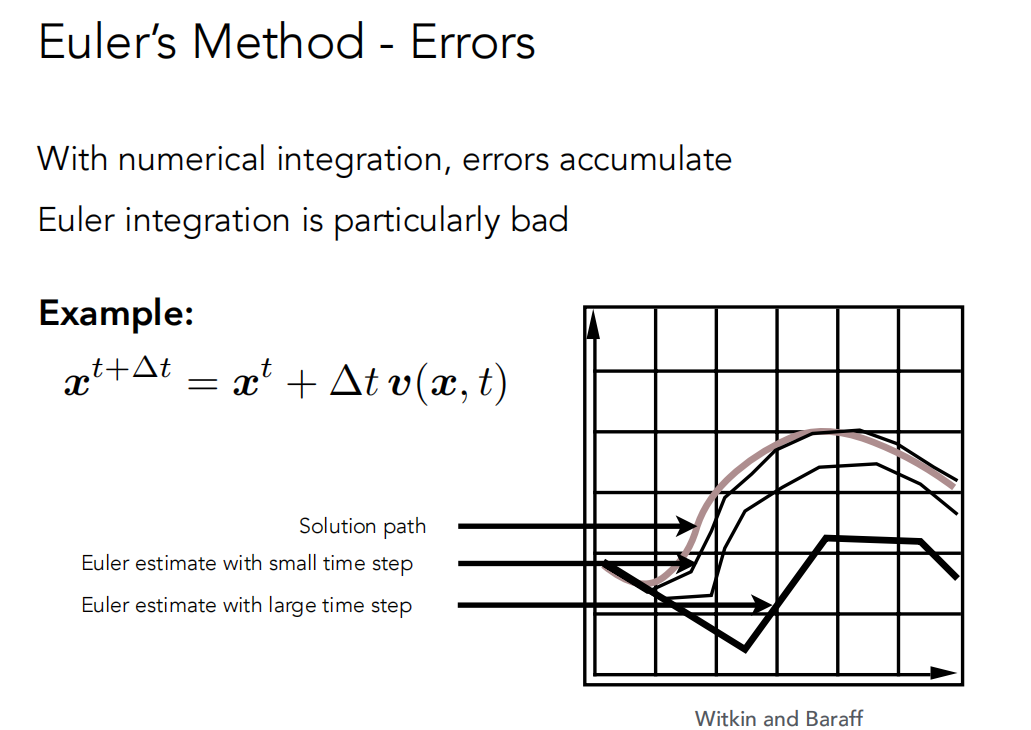
 欧拉方程的误差与步长大小有关
欧拉方程的误差与步长大小有关
 欧拉方程的不稳定性,在一个螺旋速度场中,本来应该旋转,但是不管步长选的多小都一定会飞出去。第二幅图的运动模拟也不合理。
欧拉方程的不稳定性,在一个螺旋速度场中,本来应该旋转,但是不管步长选的多小都一定会飞出去。第二幅图的运动模拟也不合理。
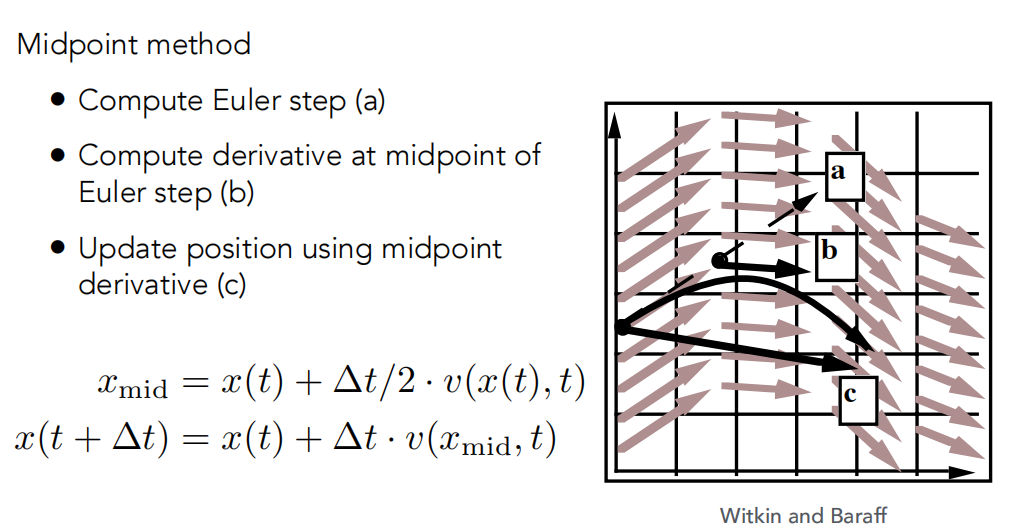
 如何解决呢,有人提出了中点法,先用欧拉算出a点,但不用a点,取中点b,考虑b点的速度,应用b点的速度回去重新算欧拉
如何解决呢,有人提出了中点法,先用欧拉算出a点,但不用a点,取中点b,考虑b点的速度,应用b点的速度回去重新算欧拉
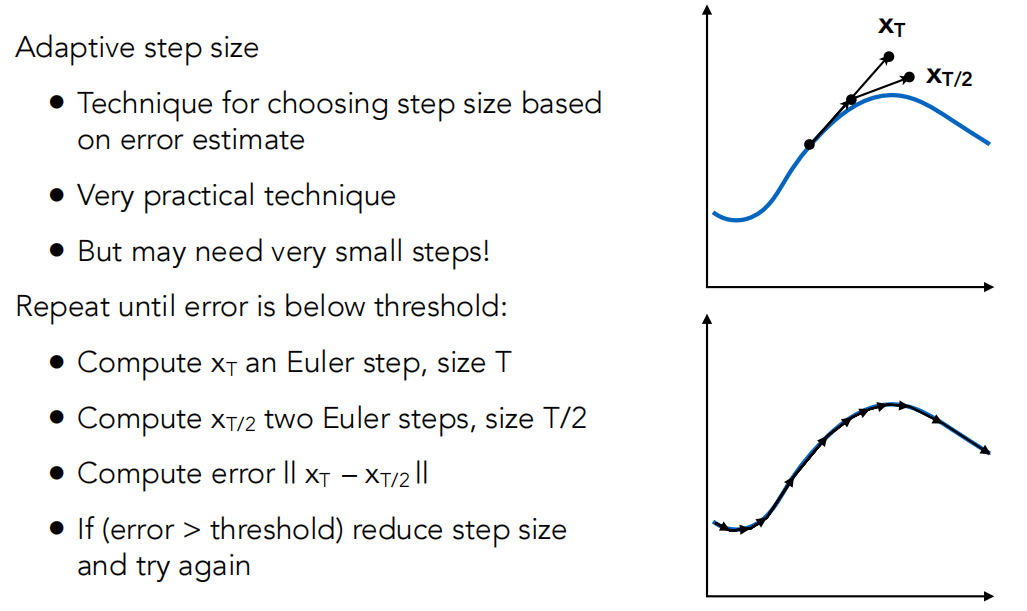
 进一步,有人用中点思想,算两次欧拉方法,不是回原点重新算,而是去中点算,如果算出来和第一次算出来差不多就不算了,说明步长够小了
进一步,有人用中点思想,算两次欧拉方法,不是回原点重新算,而是去中点算,如果算出来和第一次算出来差不多就不算了,说明步长够小了
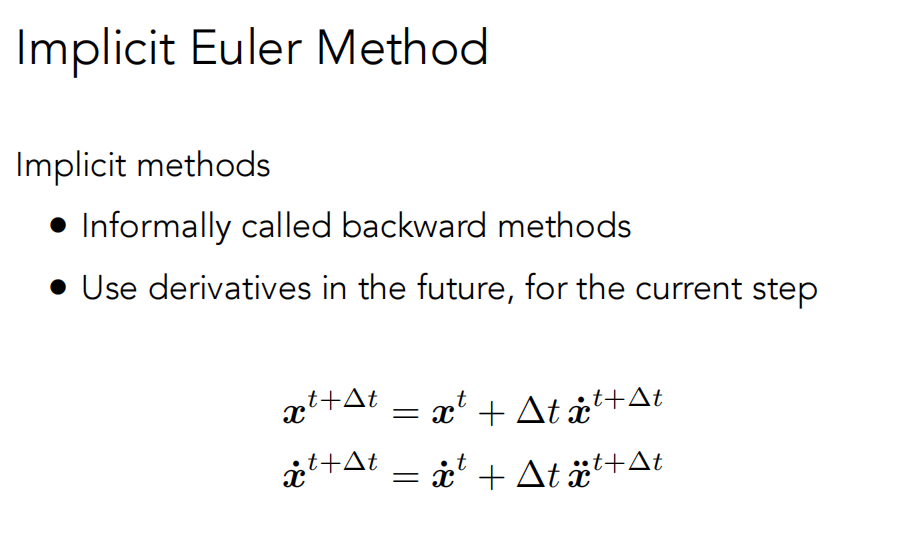
 还有隐式的欧拉方法
还有隐式的欧拉方法
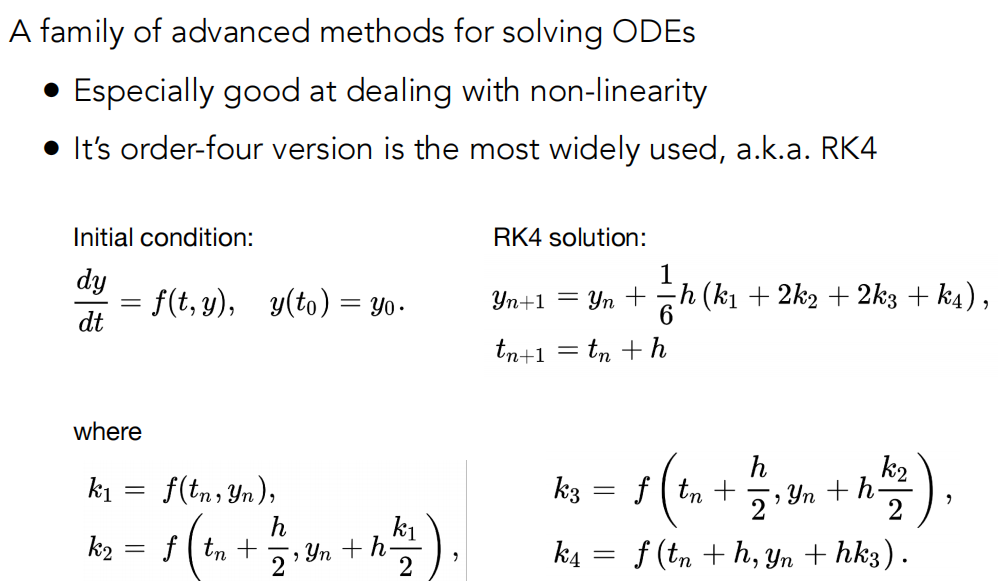
 Runge-Kutta Families
Runge-Kutta Families
 Position-Based / Verlet Integration
Position-Based / Verlet Integration
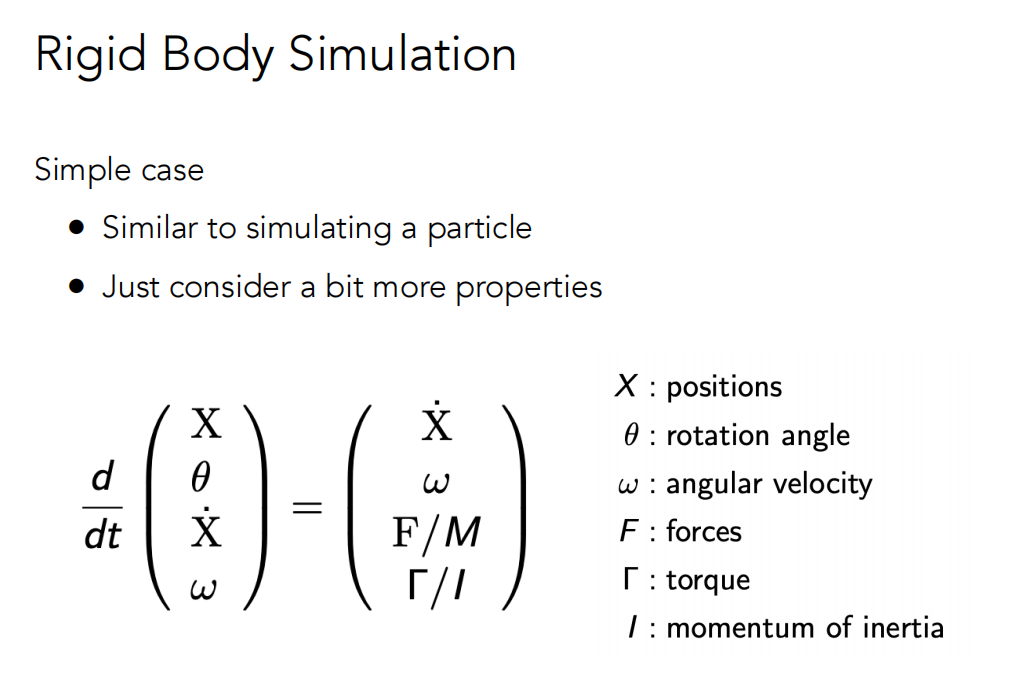
 刚体(不会发生形变)模拟
刚体(不会发生形变)模拟
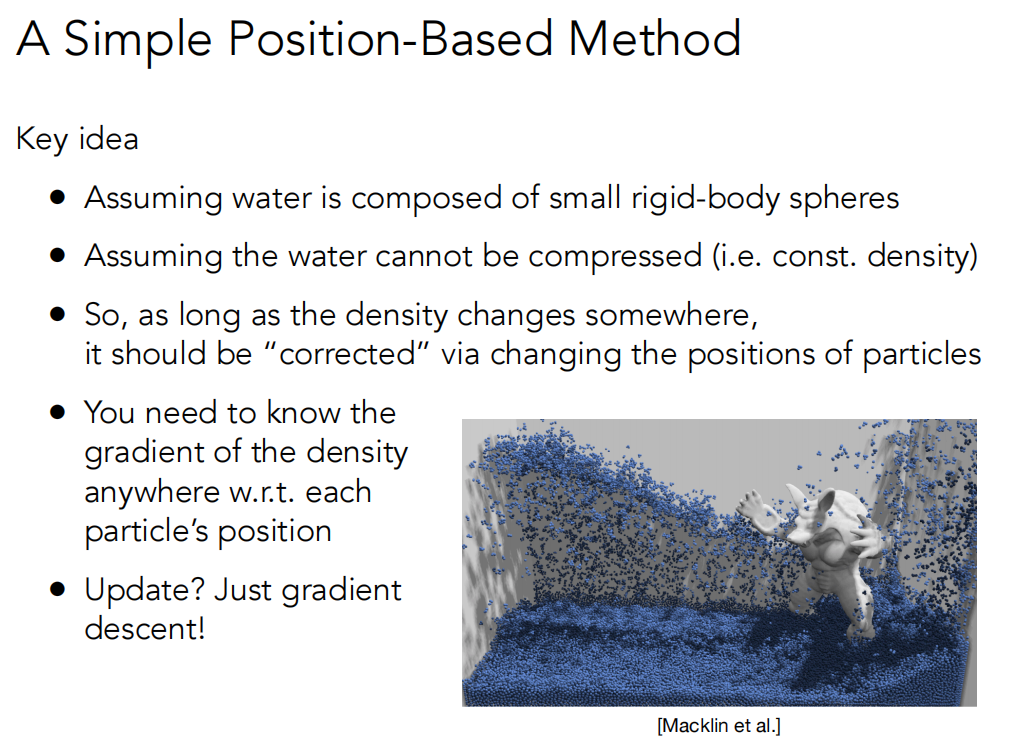
流体模拟 Fluid Simulation
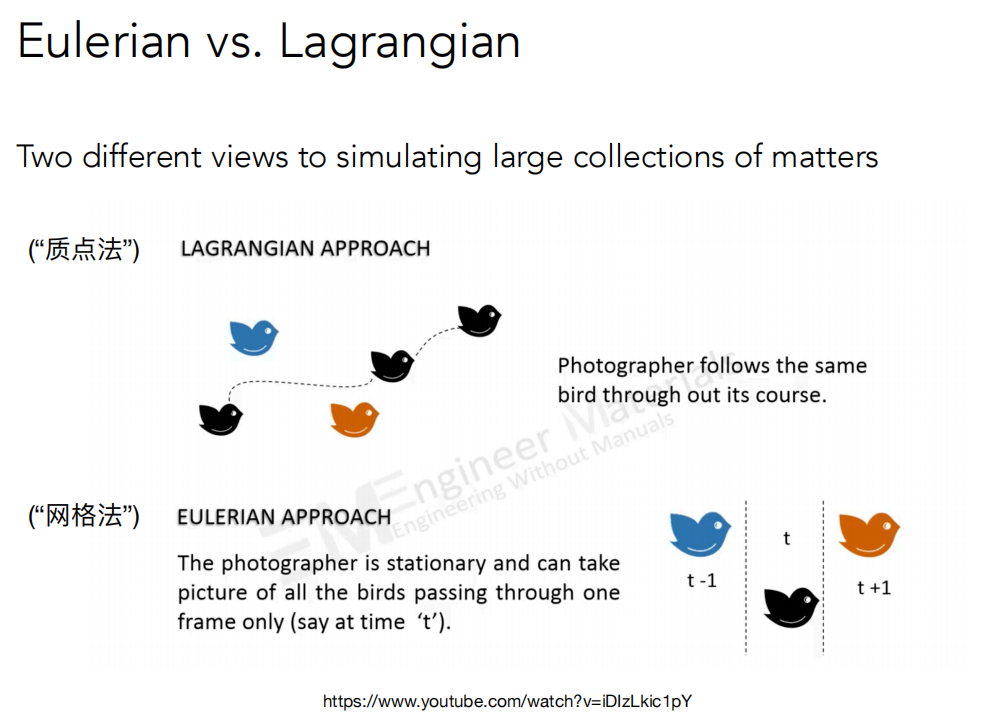
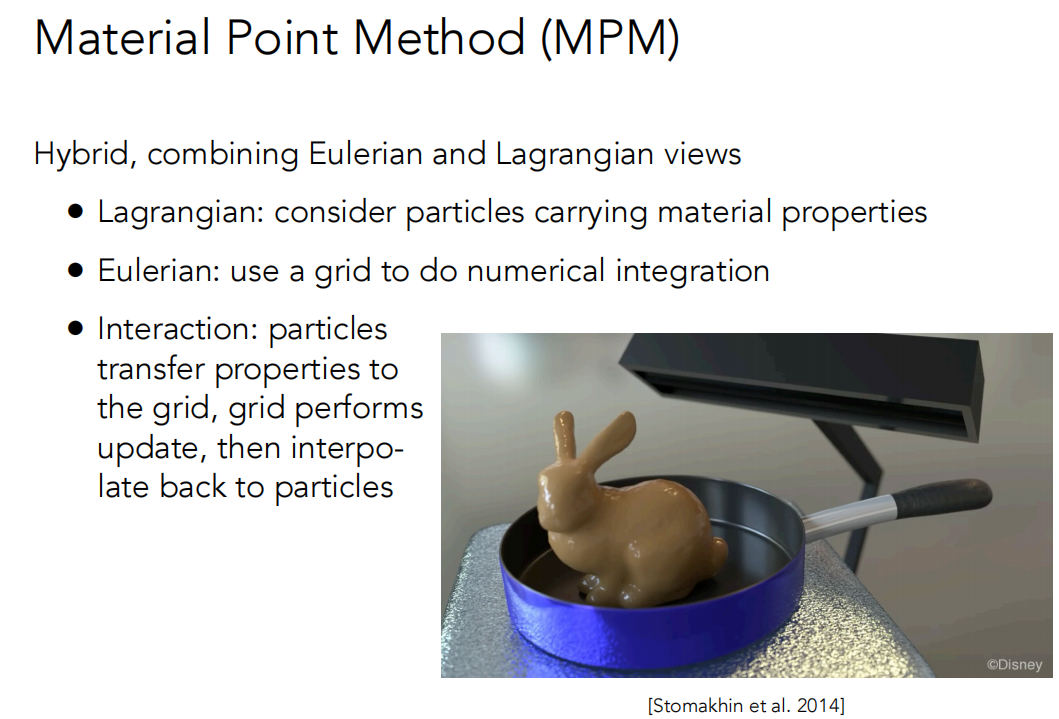 这门课的动画模拟更多都是在科普。
这门课的动画模拟更多都是在科普。