作业介绍
给出三个点的空间坐标,通过MVP矩阵将点投影到平面上,并绘制出三角形
MVP变换
Model Transformation(模型变换):将物体从局部坐标系(Local Space)转换到世界坐标系(World Space),通过以下操作实现:
- 平移(Translate):调整物体在世界空间中的位置;
- 旋转(Rotate):改变物体的朝向;
- 缩放(Scale):控制物体的大小
View Transformation(视图变换):
将摄像机移动原点;形成以摄像机为中心的视角
调整摄像机朝向:默认摄像机看向-Z轴方向,Y轴为垂直向上方向;
同步变换物体:保持物体与摄像机的相对位置关系
Projection Transformation(投影变换):
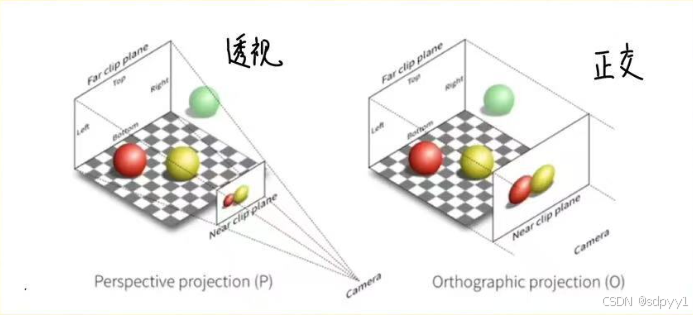
将观察空间中的三维物体投影到二维裁剪空间(Clip Space),分为两种类型:
正交投影(Orthographic Projection)
透视投影(Perspective Projection)
作业代码逻辑解析
main函数分析
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
|
int main(int argc, const char** argv)
{
// 旋转角度
float angle = 0;
bool command_line = false;
std::string filename = "output.png";
if (argc >= 3) {
command_line = true;
angle = std::stof(argv[2]); // -r by default
if (argc == 4) {
filename = std::string(argv[3]);
}
else
return 0;
}
rst::rasterizer r(700, 700);
// 摄像机位置
Eigen::Vector3f eye_pos = {0, 0, 5};
// 三角形的三个顶点
std::vector<Eigen::Vector3f> pos{{2, 0, -2}, {0, 2, -2}, {-2, 0, -2}};
// 顶点顺序
std::vector<Eigen::Vector3i> ind{{0, 1, 2}};
// 顶点坐标和顺序加载到光栅器
auto pos_id = r.load_positions(pos);
auto ind_id = r.load_indices(ind);
int key = 0;
int frame_count = 0;
if (command_line) {
r.clear(rst::Buffers::Color | rst::Buffers::Depth);
// 设置MVP三个矩阵
r.set_model(get_model_matrix(angle));
r.set_view(get_view_matrix(eye_pos));
r.set_projection(get_projection_matrix(45, 1, 0.1, 50));
// 画出图形
r.draw(pos_id, ind_id, rst::Primitive::Triangle);
cv::Mat image(700, 700, CV_32FC3, r.frame_buffer().data());
image.convertTo(image, CV_8UC3, 1.0f);
cv::imwrite(filename, image);
return 0;
}
while (key != 27) {
r.clear(rst::Buffers::Color | rst::Buffers::Depth);
r.set_model(get_model_matrix(angle));
r.set_view(get_view_matrix(eye_pos));
r.set_projection(get_projection_matrix(45, 1, 0.1, 50));
r.draw(pos_id, ind_id, rst::Primitive::Triangle);
cv::Mat image(700, 700, CV_32FC3, r.frame_buffer().data());
image.convertTo(image, CV_8UC3, 1.0f);
cv::imshow("image", image);
key = cv::waitKey(10);
std::cout << "frame count: " << frame_count++ << '\n';
if (key == 'a') {
angle += 10;
}
else if (key == 'd') {
angle -= 10;
}
}
return 0;
}
|
这次作业主要就是实现MVP矩阵,一部分代码就是把MVP矩阵装进光栅化器中。所以别的代码已经没必要看了,在下次作业中再细看
模型变换:get_model_matrix(float rotation_angle)
实现model变换,可以进行缩放、平移、旋转,作业这里只需要进行绕z轴的旋转,在上次作业中,上一篇博客已经提到了如何进行三位物体的旋转,绕各个轴都有对应的变换矩阵,直接左乘到坐标向量即可。
1
2
3
4
5
6
7
|
Eigen::Matrix4f get_model_matrix(float rotation_angle)
{
Eigen::Matrix4f model = Eigen::Matrix4f::Identity();
Eigen::Matrix4f rotationMatrix;
rotationMatrix << cos(rotation_angle/180* MY_PI),-sin(rotation_angle/180* MY_PI),0,0, sin(rotation_angle/180*MY_PI),cos(rotation_angle/180* MY_PI),0,0,0,0,1,0,0,0,0,1;
return rotationMatrix;
}
|
视图变换:get_view_matrix(Eigen::Vector3f eye_pos)
本次作业并没有让完成这部分,已经被写好了,这里写分析一下代码,视图变换主要作用就是如何把摄像机放在世界远点来进行观察,main函数中已经定义了Eigen::Vector3f eye_pos = {0, 0, 5};
1
2
3
4
5
6
7
8
9
|
Eigen::Matrix4f get_view_matrix(Eigen::Vector3f eye_pos)
{
Eigen::Matrix4f view = Eigen::Matrix4f::Identity();
Eigen::Matrix4f translate;
translate << 1, 0, 0, -eye_pos[0], 0, 1, 0, -eye_pos[1], 0, 0, 1,
-eye_pos[2], 0, 0, 0, 1;
view = translate * view;
return view;
}
|
其中可以看出视图变换的矩阵为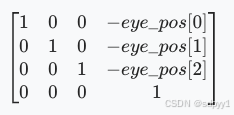 ,说明只进行了平移操作,摄像机的向上方向和看的方向都为默认。为其他所以物体的坐标都左乘这个矩阵,就实现了所有物体以摄像机为原点的位置坐标
,说明只进行了平移操作,摄像机的向上方向和看的方向都为默认。为其他所以物体的坐标都左乘这个矩阵,就实现了所有物体以摄像机为原点的位置坐标
投影变换:get_projection_matrix(float eye_fov, float aspect_ratio, float,zNear, float zFar)
本节图片来自https://zhuanlan.zhihu.com/p/620496517
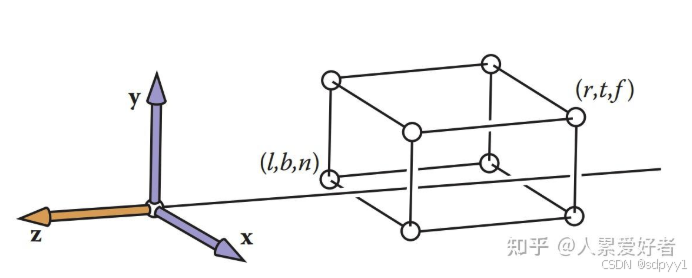
在给定的参数描述下,就可以确定整个需要投影的空间位置,如下图所示,目标就是把这个立方体区域转换到NDC坐标
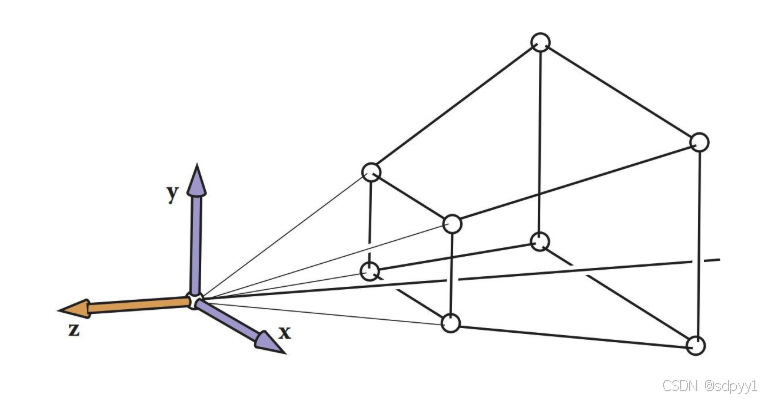 第一步的目标是将该区域变为长方体区域,在进行转换时,离得远的物体就会相应的变小
第一步的目标是将该区域变为长方体区域,在进行转换时,离得远的物体就会相应的变小
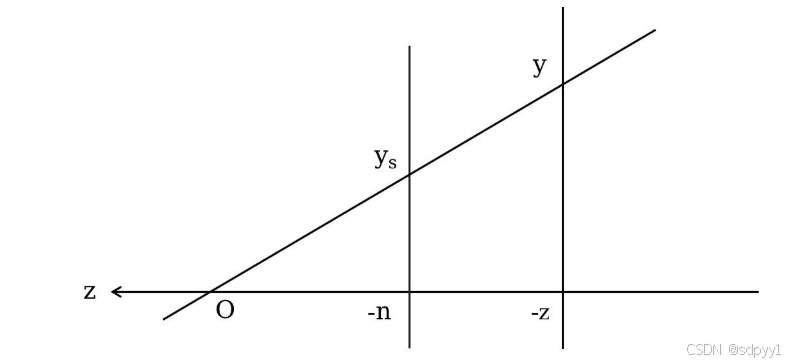
从+x向-x方向看结构如下图,压缩比例应该为n/z,所以 y = ny/z,x同理
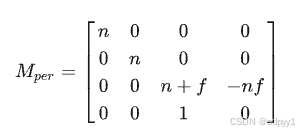
 设计一个变换矩阵
设计一个变换矩阵
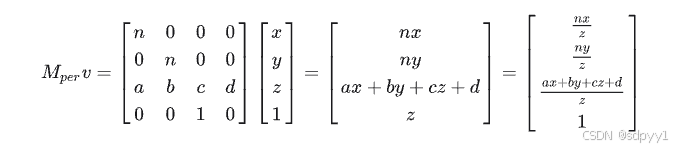
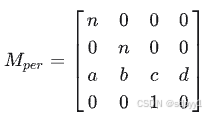 左乘后同时除以z,根据齐次坐标的性质,仍表示同一个坐标,这样每个坐标的x,y都处理好了,就剩下z未处理,其中包含a,b,c,d4个未知数
左乘后同时除以z,根据齐次坐标的性质,仍表示同一个坐标,这样每个坐标的x,y都处理好了,就剩下z未处理,其中包含a,b,c,d4个未知数
z坐标获得与上次作业旋转公式推导的方法相似,取几个在变化过程中不会变z的坐标来求解
近平面上($x^1,y^1,n,1$)与中心点($0,0,n,1$),远平面($x^2,y^2,f,1$)和中心点$0,0,f,1$),通过这些点,以及全部近面和远面中心点z不会变这些信息,可以算出a,b,c,d如何取值,最终得到的变换矩阵为
 但是并没有结束,此时以及得到如下图所示的情况,下一步还需要把空间移动到NDC,就是将长方体变为坐标值在 $[-1,1]^3$
的立方体。(从这里开始,其实就是正交投影的过程)
以上图坐标为例,平移的方向和距离用t表示很好理解,就是把整个空间的中心挪到坐标原点
但是并没有结束,此时以及得到如下图所示的情况,下一步还需要把空间移动到NDC,就是将长方体变为坐标值在 $[-1,1]^3$
的立方体。(从这里开始,其实就是正交投影的过程)
以上图坐标为例,平移的方向和距离用t表示很好理解,就是把整个空间的中心挪到坐标原点
$$
t = \left( -\frac{l + r}{2},\ -\frac{b + t}{2},\ -\frac{n + f}{2} \right)
$$
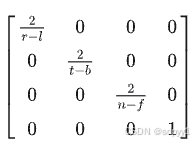
下一步就是把所有坐标都进行单位化,就是把长方体的变长都变成1,对坐标进行统一缩小,缩小矩阵如下
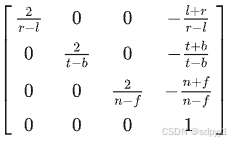
 结合上边的平移后得到正交投影的变化矩阵
结合上边的平移后得到正交投影的变化矩阵
 结合透视和正交的矩阵就可以得到最终的投影矩阵
结合透视和正交的矩阵就可以得到最终的投影矩阵
代码实现
代码来自https://blog.csdn.net/qq_41265365/article/details/124229095,懒得算了,就是把三个矩阵合并成了一个写的
1
2
3
4
5
6
7
8
9
10
11
12
13
|
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio,
float zNear, float zFar)
{
Eigen::Matrix4f Mpersp;
float fovY = eye_fov*MY_PI/180.0;
float cota = 1.f/tanf(fovY/2);
float zD = zNear-zFar;
Mpersp << -cota/aspect_ratio, 0, 0, 0,
0, -cota, 0, 0,
0, 0, (zNear+zFar)/zD, -2*zNear*zFar/zD,
0, 0, 1, 0;
return Mpersp;
}
|