1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
|
#include "thirdParty/tgaimage.h"
#include "model.h"
#include <vector>
#include <cmath>
#include "iostream"
using namespace std;
constexpr static int width = 1000;
constexpr static int height = 1000;
float angleX = 0.0f;
float angleY = 0.0f;
float angleZ = 0.0f;
float tx = 0.0f;
float ty = 0.0f;
float tz = 0.0f;
float sx = 1.0f;
float sy = 1.0f;
float sz = 1.0f;
Eigen::Vector3f eye_pos{0,0,3};
Eigen::Vector3f eye_dir(0.0f, 0.0f, -1.0f);
Eigen::Vector3f up(0.0f, 1.0f, 0.0f);
float fovY = 45.0f;
float aspectRatio = 1.0f;
float near = 0.1f;
float far = 100.0f;
Eigen::Vector3f lightDir{1,1,0};
Eigen::Vector3f lightIntensity{5,5,5};
// 计算三角形面积,可能返回负数,表示背对屏幕
float signed_triangle_area(float ax, float ay, float bx, float by, float cx, float cy) {
return .5f*((by-ay)*(bx+ax) + (cy-by)*(cx+bx) + (ay-cy)*(ax+cx));
}
Eigen::Vector3f TGAColorToVector3f(const TGAColor& color) {
float r = static_cast<float>(color.bgra[2]) / 255.0f;
float g = static_cast<float>(color.bgra[1]) / 255.0f;
float b = static_cast<float>(color.bgra[0]) / 255.0f;
return Eigen::Vector3f(r, g, b);
}
// 将Eigen::Vector3f转换为TGAColor的函数
TGAColor Vector3fToTGAColor(const Eigen::Vector3f& vectorColor) {
auto clamp = [](float v) { return std::max(0.0f, std::min(1.0f, v)); };
unsigned char r = static_cast<unsigned char>(clamp(vectorColor.x()) * 255.0f);
unsigned char g = static_cast<unsigned char>(clamp(vectorColor.y()) * 255.0f);
unsigned char b = static_cast<unsigned char>(clamp(vectorColor.z()) * 255.0f);
return TGAColor(r, g, b);
}
// blinnPhongShading
TGAColor blinnPhongShading(const TGAColor & textureColor, const Vector3f & point, const Vector3f & normal,TGAColor specKd,bool isShadow) {
// 环境光系数
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
// 漫反射系数(来自材质贴图)
Eigen::Vector3f kd = TGAColorToVector3f(textureColor);
// 高光系数(来自高光贴图)
Eigen::Vector3f ks = TGAColorToVector3f(specKd);
Eigen::Vector3f amb_light_intensity{10, 10, 10};
// 环境光强度
// 高光的指数,越大对角度越敏感
float p = 150;
// 计算点到光源的向量
Eigen::Vector3f light_vec = lightDir - point;
// 计算点到光源的距离
float r = light_vec.norm();
// 归一化从点到光源的向量
Eigen::Vector3f light_dir = light_vec.normalized();
// 漫反射
Eigen::Vector3f diffuse = kd.cwiseProduct(lightIntensity / (r * r)) * std::max(0.0f, normal.dot(light_dir));
// 高光反射
// 计算从表面点到观察者的向量
Eigen::Vector3f view_dir = (eye_pos - point).normalized();
// 计算半程向量
Eigen::Vector3f halfVector = (light_dir + view_dir).normalized();
Eigen::Vector3f specular = ks.cwiseProduct(lightIntensity / (r * r)) * std::pow(std::max(0.0f, normal.dot(halfVector)), p);
Eigen::Vector3f all = diffuse + specular + ka.cwiseProduct(amb_light_intensity);
if (isShadow){
return Vector3fToTGAColor(all*0.2);
}
return Vector3fToTGAColor(all);
}
// 插值函数
Eigen::Vector3f interpolate(const Eigen::Vector3f& v0, const Eigen::Vector3f& v1, const Eigen::Vector3f& v2, double alpha, double beta, double gamma) {
return alpha * v0 + beta * v1 + gamma * v2;
}
float interpolate(float v0, float v1, float v2, float alpha, float beta, float gamma) {
return alpha * v0 + beta * v1 + gamma * v2;
}
// 从切线法线转为法线
Eigen::Vector3f getNormalFromTangent(const Triangle& triangle, const Eigen::Vector3f& tangentSpaceNormal, const Eigen::Vector3f& barycentricNorm) {
// 计算切线
Eigen::Vector3f edge1 = triangle.globalCoords[1].head<3>() - triangle.globalCoords[0].head<3>();
Eigen::Vector3f edge2 = triangle.globalCoords[2].head<3>() - triangle.globalCoords[0].head<3>();
Eigen::Vector2f deltaUV1 = triangle.texCoords[1] - triangle.texCoords[0];
Eigen::Vector2f deltaUV2 = triangle.texCoords[2] - triangle.texCoords[0];
float f = 1.0f / (deltaUV1.x() * deltaUV2.y() - deltaUV2.x() * deltaUV1.y());
Eigen::Vector3f tangent;
tangent.x() = f * (deltaUV2.y() * edge1.x() - deltaUV1.y() * edge2.x());
tangent.y() = f * (deltaUV2.y() * edge1.y() - deltaUV1.y() * edge2.y());
tangent.z() = f * (deltaUV2.y() * edge1.z() - deltaUV1.y() * edge2.z());
tangent.normalize();
// 计算副切线
Eigen::Vector3f bitangent;
bitangent.x() = f * (-deltaUV2.x() * edge1.x() + deltaUV1.x() * edge2.x());
bitangent.y() = f * (-deltaUV2.x() * edge1.y() + deltaUV1.x() * edge2.y());
bitangent.z() = f * (-deltaUV2.x() * edge1.z() + deltaUV1.x() * edge2.z());
bitangent.normalize();
// 构建 TBN 矩阵
Eigen::Matrix3f TBN;
TBN.col(0) = tangent;
TBN.col(1) = bitangent;
TBN.col(2) = barycentricNorm;
// 将切向法线转换到世界空间
return TBN * tangentSpaceNormal;
}
void shadow(Triangle &triangle,std::vector<std::vector<float>> *shadowBuffer){
float ax = triangle.screenCoords[0].x();
float ay = triangle.screenCoords[0].y();
float bx = triangle.screenCoords[1].x();
float by = triangle.screenCoords[1].y();
float cx = triangle.screenCoords[2].x();
float cy = triangle.screenCoords[2].y();
int bbminx = std::floor(std::min(std::min(ax, bx), cx));
int bbminy = std::ceil(std::min(std::min(ay, by), cy));
int bbmaxx = std::floor(std::max(std::max(ax, bx), cx));
int bbmaxy = std::ceil(std::max(std::max(ay, by), cy));
float total_area = signed_triangle_area(ax, ay, bx, by, cx, cy);
for (int x = bbminx; x <= bbmaxx; x++) {
for (int y = bbminy; y <= bbmaxy; y++) {
// 虽然可以把整个三角形直接剔除,但是我希望只是把屏幕外的像素剔除
if (x < 0 || x >= width || y < 0 || y >= height) {
continue;
}
float alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;
float beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;
float gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;
if (alpha < 0 || beta < 0 || gamma < 0) continue; // 说明当前像素不在三角形内部
float barycentricZ = interpolate(triangle.screenCoords[0].z(), triangle.screenCoords[1].z(),triangle.screenCoords[2].z(), alpha, beta, gamma);
if (shadowBuffer->at(x).at(y) < barycentricZ) {
shadowBuffer->at(x).at(y) = barycentricZ;
}
}
}
}
// 绘制一个三角形
void drawTriangle(Triangle &triangle, TGAImage &framebuffer, std::vector<std::vector<float>> *zBuffer, std::vector<std::vector<float>> *shadowBuffer,Texture &texture,
Texture &nm, Texture &spec, Texture &nm_tangent,Eigen::Matrix4f mvpForShadow) {
float ax = triangle.screenCoords[0].x();
float ay = triangle.screenCoords[0].y();
float bx = triangle.screenCoords[1].x();
float by = triangle.screenCoords[1].y();
float cx = triangle.screenCoords[2].x();
float cy = triangle.screenCoords[2].y();
int bbminx = std::floor(std::min(std::min(ax, bx), cx));
int bbminy = std::ceil(std::min(std::min(ay, by), cy));
int bbmaxx = std::floor(std::max(std::max(ax, bx), cx));
int bbmaxy = std::ceil(std::max(std::max(ay, by), cy));
// 如果面积为负数,背对屏幕,被裁剪
float total_area = signed_triangle_area(ax, ay, bx, by, cx, cy);
if (total_area < 1) return;
#pragma omp parallel for
for (int x = bbminx; x <= bbmaxx; x++) {
for (int y = bbminy; y <= bbmaxy; y++) {
// 虽然可以把整个三角形直接剔除,但是我希望只是把屏幕外的像素剔除
if (x < 0 || x >= width || y < 0 || y >= height) {
continue;
}
float alpha = signed_triangle_area(x, y, bx, by, cx, cy) / total_area;
float beta = signed_triangle_area(x, y, cx, cy, ax, ay) / total_area;
float gamma = signed_triangle_area(x, y, ax, ay, bx, by) / total_area;
if (alpha < 0 || beta < 0 || gamma < 0) continue; // 说明当前像素不在三角形内部
float barycentricZ = interpolate(triangle.screenCoords[0].z(), triangle.screenCoords[1].z(),triangle.screenCoords[2].z(), alpha, beta, gamma);
Eigen::Vector3f barycentricGlobalCoord = interpolate(triangle.globalCoords[0].head<3>(),triangle.globalCoords[1].head<3>(),triangle.globalCoords[2].head<3>(), alpha, beta,gamma);
float texU = interpolate(triangle.texCoords[0].x(), triangle.texCoords[1].x(),triangle.texCoords[2].x(), alpha, beta, gamma);
float texV = interpolate(triangle.texCoords[0].y(), triangle.texCoords[1].y(),triangle.texCoords[2].y(), alpha, beta, gamma);
TGAColor texColor = texture.getColor(texU, texV);
Eigen::Vector3f barycentricNorm = interpolate(triangle.normal[0], triangle.normal[1],triangle.normal[2], alpha, beta, gamma);
// 法线来自法线贴图
// Eigen::Vector3f barycentricNorm = TGAColorToVector3f(nm.getColor(texU,texV))*2-Vector3f{1,1,1};
// 切线法线贴图
// Eigen::Vector3f barycentricNmTangent =TGAColorToVector3f(nm_tangent.getColor(texU, texV)) * 2 - Vector3f{1, 1, 1};
// barycentricNmTangent = getNormalFromTangent(triangle, barycentricNmTangent, barycentricNorm);
// 高光系数来自高光贴图
TGAColor specKd = spec.getColor(texU, texV);
// zbuffer中缓存的渲染物体距离小于当前渲染物体的距离时,才覆盖渲染
if (zBuffer->at(x).at(y) < barycentricZ) {
zBuffer->at(x).at(y) = barycentricZ;
// 阴影处理
// 1. 找到该像素对应物体在原空间的位置
Eigen::Vector4f locationInShaowBuffer = mvpForShadow * (barycentricGlobalCoord.homogeneous());
locationInShaowBuffer.x() /= locationInShaowBuffer.w();
locationInShaowBuffer.y() /= locationInShaowBuffer.w();
locationInShaowBuffer.z() /= locationInShaowBuffer.w();
locationInShaowBuffer.x() = 0.5*width*(locationInShaowBuffer.x()+1);
locationInShaowBuffer.y() = 0.5*height*(locationInShaowBuffer.y()+1);
bool isShadow = false;
// 在阴影中
if (locationInShaowBuffer.z() < shadowBuffer->at(locationInShaowBuffer.x()).at(locationInShaowBuffer.y())){
isShadow = true;
}
// 直接使用贴图
// framebuffer.set(x,y, texture.getColor(texU,texV));
// 使用phongshading光照模型
framebuffer.set(x,y, blinnPhongShading(texColor,barycentricGlobalCoord,barycentricNorm,specKd,isShadow));
// 直接使用法线贴图
// framebuffer.set(x,y, nm.getColor(texU,texV));
// 使用法线贴图的法线配合phongshading
// framebuffer.set(x,y, blinnPhongShading(texColor,barycentricGlobalCoord,barycentricNorm,specKd));
// 使用切线法线贴图配合phongshaing
// framebuffer.set(x, y,blinnPhongShading(texColor, barycentricGlobalCoord, barycentricNmTangent, specKd));
}
}
}
}
int main() {
Model model("./obj/diablo3_pose/diablo3_pose.obj", "./obj/diablo3_pose/diablo3_pose_diffuse.tga");
TGAImage framebuffer(width, height, TGAImage::RGB);
// 定义一个zBuffer,并设置全部数据为最小负数
auto *zBuffer = new std::vector<std::vector<float>>(width, std::vector<float>(height,std::numeric_limits<float>::lowest()));
// 用于shadow
auto *shadowBuffer = new std::vector<std::vector<float>>(width, std::vector<float>(height,std::numeric_limits<float>::lowest()));
// 获取法线贴图
Texture nm("./obj/diablo3_pose/diablo3_pose_nm.tga");
Texture spec("./obj/diablo3_pose/diablo3_pose_spec.tga");
Texture nm_tangent("./obj/diablo3_pose/diablo3_pose_nm_tangent.tga");
// 首先先从光源位置渲染,来赋值shadowBuffer
model.setModelTransformation(angleX, angleY, angleZ, tx, ty, tz, sx, sy, sz);
model.setViewTransformation(lightDir*4, eye_dir, up);
model.setProjectionTransformation(fovY, aspectRatio, near, far);
// 获取所有变换矩阵
Eigen::Matrix4f mvpForShadow = model.getMVP();
for (Triangle triangle: model.triangleList) {
// 坐标投影
triangle.setScreenCoords(mvpForShadow, width, height);
// 绘制三角形
shadow(triangle, shadowBuffer);
}
// 转回正常视角,进行渲染
model.setModelTransformation(angleX, angleY, angleZ, tx, ty, tz, sx, sy, sz);
model.setViewTransformation(eye_pos, eye_dir, up);
model.setProjectionTransformation(fovY, aspectRatio, near, far);
// 获取所有变换矩阵
Eigen::Matrix4f mvp = model.getMVP();
// 遍历obj文件中的每个三角形
for (Triangle triangle: model.triangleList) {
// 坐标投影
triangle.setScreenCoords(mvp, width, height);
// 摄像机空间点转光源空间点的矩阵
Eigen::Matrix4f viewToLightTrans = mvpForShadow * (mvp.inverse());
// 绘制三角形
drawTriangle(triangle, framebuffer, zBuffer,shadowBuffer, model.texture, nm, spec, nm_tangent,mvpForShadow);
}
framebuffer.write_tga_file("framebuffer.tga");
delete (zBuffer);
delete (shadowBuffer);
return 0;
}
|
 完整代码在(Gouraud-shading分支):https://github.com/sdpyy1/CppLearn/tree/Gouraud-shading
完整代码在(Gouraud-shading分支):https://github.com/sdpyy1/CppLearn/tree/Gouraud-shading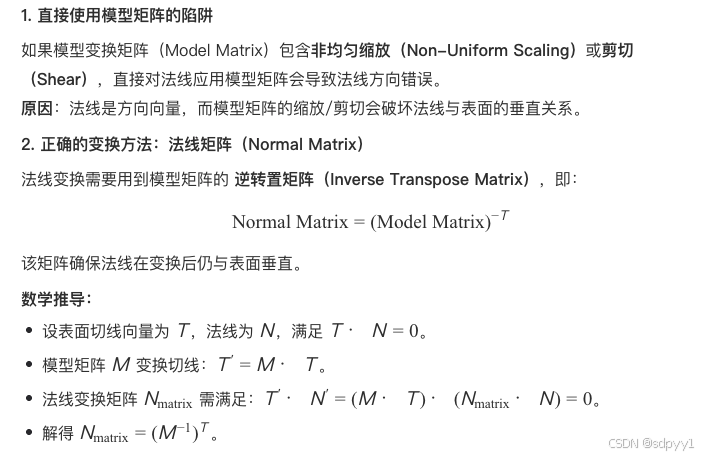 下面使用法线贴图作为color得到的图片
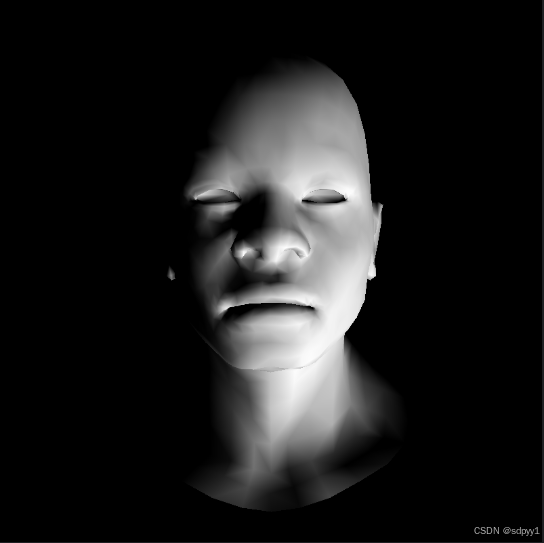
下面使用法线贴图作为color得到的图片
 下面使用法线贴图作为phongshading的法线来渲染光照,注意贴图范围是[-1,1],而颜色通道是[0,1],也就是拿到的材质颜色是[0,1]的,需要先转成[-1,1]才可以使用,关键代码如下
下面使用法线贴图作为phongshading的法线来渲染光照,注意贴图范围是[-1,1],而颜色通道是[0,1],也就是拿到的材质颜色是[0,1]的,需要先转成[-1,1]才可以使用,关键代码如下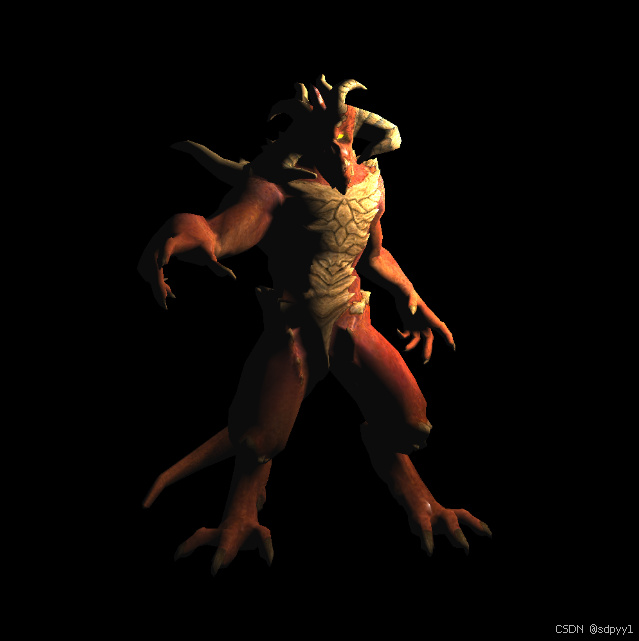


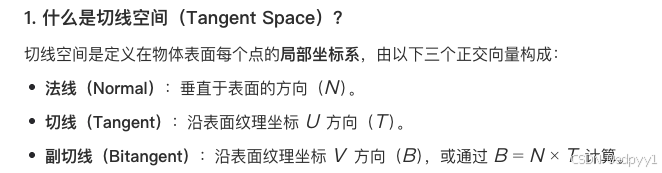 这个东西就是把法线存储在切线空间坐标下,如果需要法线就在着色器中,通过 TBN矩阵(Tangent-Bitangent-Normal Matrix)将法线从切线空间转换到世界空间
这个东西就是把法线存储在切线空间坐标下,如果需要法线就在着色器中,通过 TBN矩阵(Tangent-Bitangent-Normal Matrix)将法线从切线空间转换到世界空间 获取到切线法线贴图后,需要左乘一个TBN矩阵,转为空间法线才能使用,第一列是三角形的切线,第二列是副切线,第三列是法线
获取到切线法线贴图后,需要左乘一个TBN矩阵,转为空间法线才能使用,第一列是三角形的切线,第二列是副切线,第三列是法线
 具体转化函数如下
具体转化函数如下
 下图通过过曝来展示哪些像素被阴影化了,还是蛮合理的~
下图通过过曝来展示哪些像素被阴影化了,还是蛮合理的~
 在使用普通的材质贴图下效果比较好
在使用普通的材质贴图下效果比较好

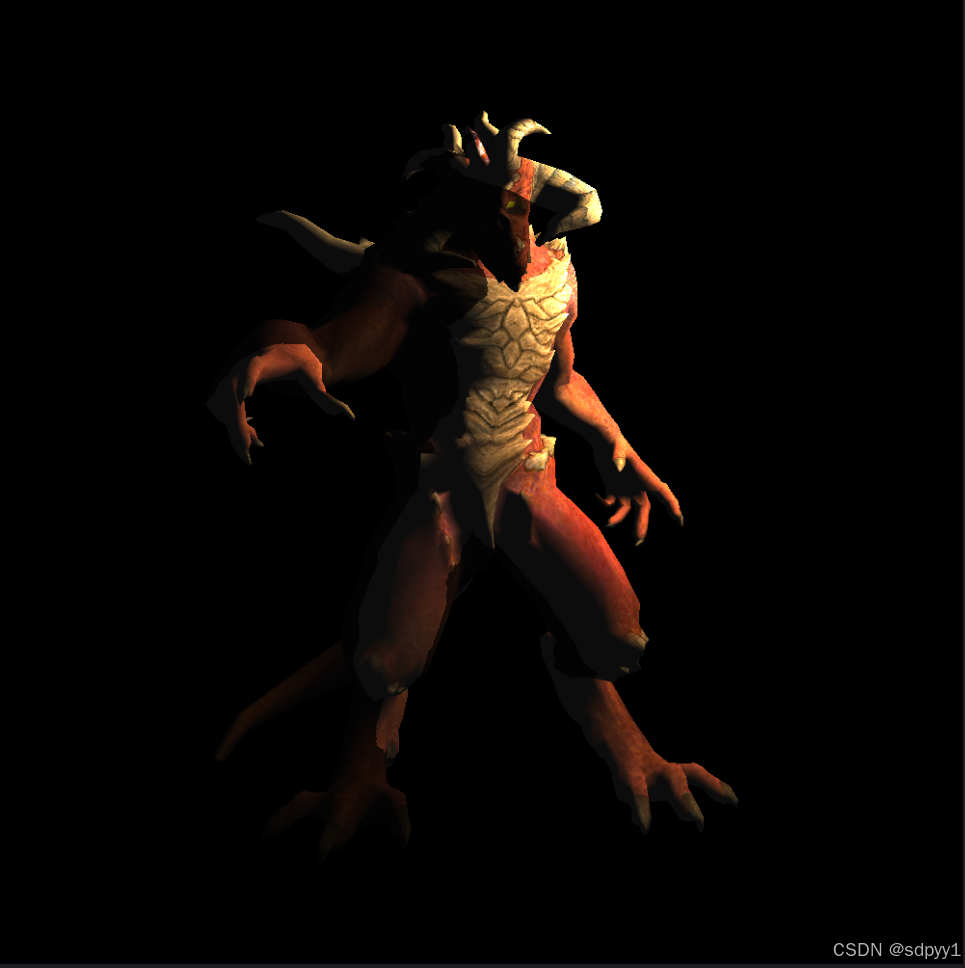 ai给出的解释:这种现象叫做自阴影
ai给出的解释:这种现象叫做自阴影