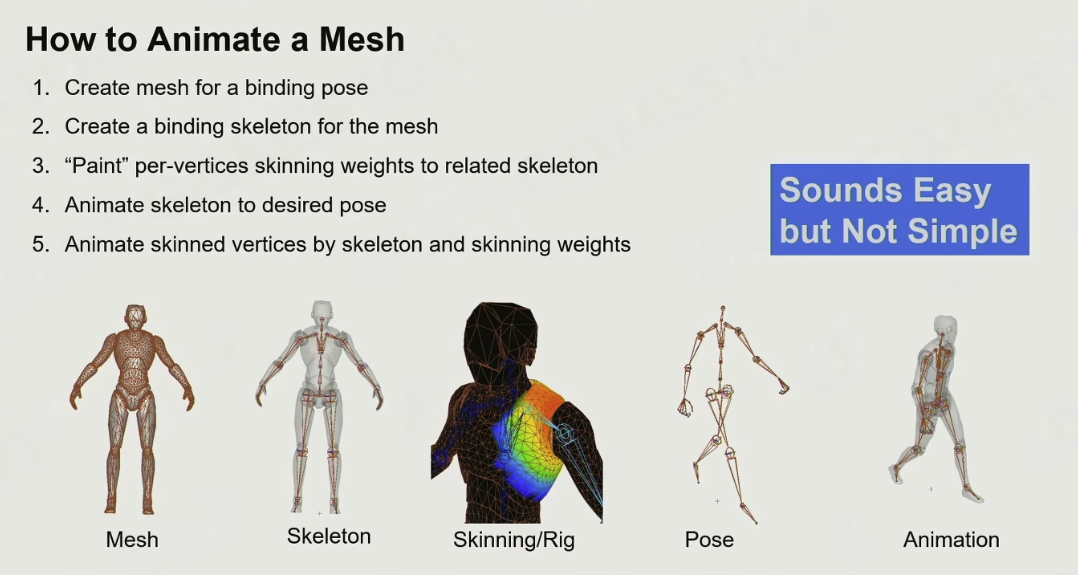
蒙皮动画
这里讲的就是科普了一下
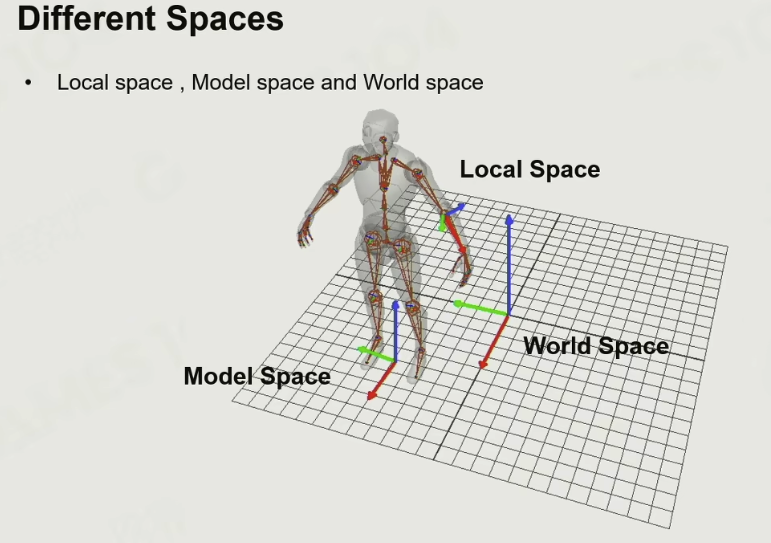
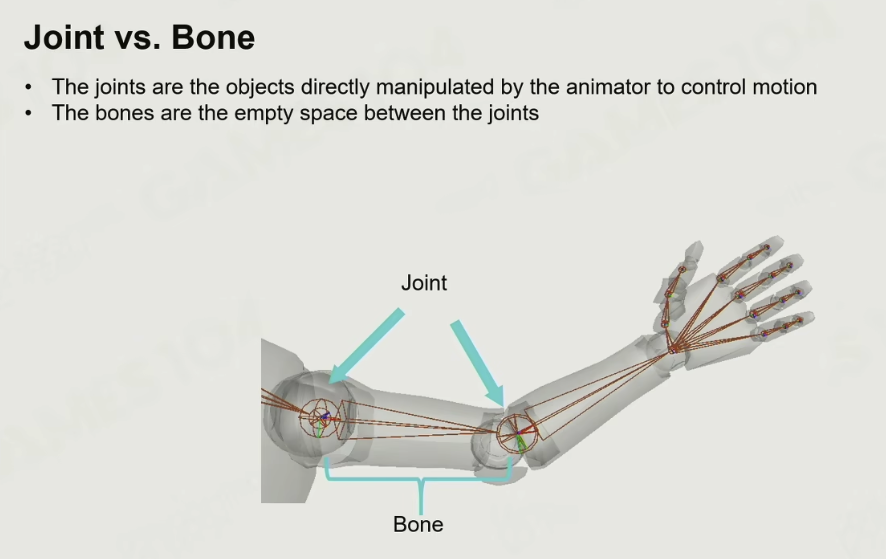
坐标系
实际存储的数据是关节数据
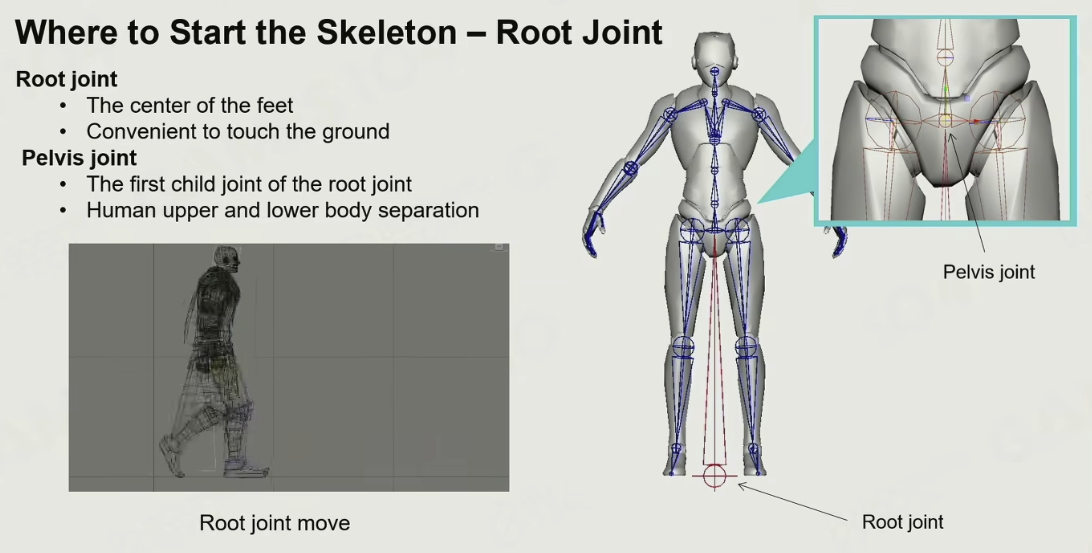
Root关节一般存在脚底,为了方便计算移速、跳跃高度。髋关节是第一个子关节
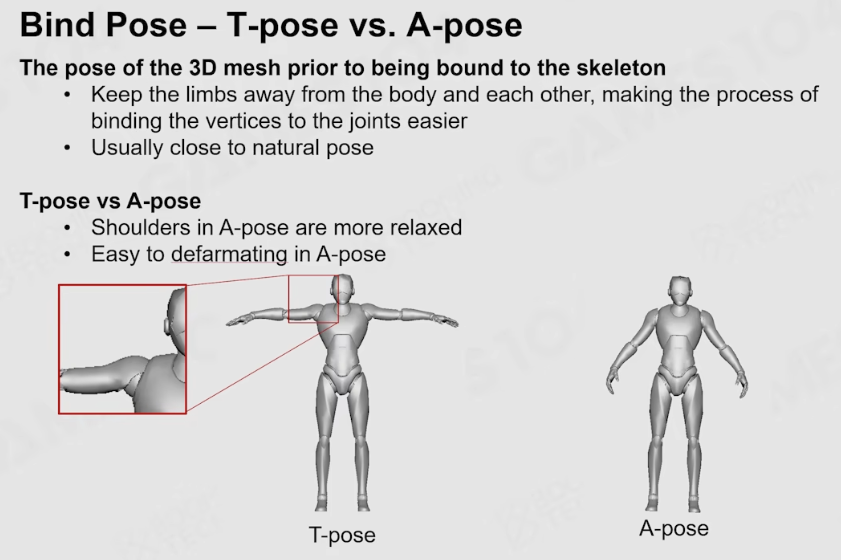
T-pose和A-pose:
A-pose 下,肩关节旋转角度为 0°,肘部微弯 15°,手掌自然朝向大腿关节,旋转轴处于中性位置,绑定师可以更精确地绘制顶点权重,控制手臂摆动和肌肉变形,提高工作效率和质量。T-pose 中,肩部会受到挤压,当手臂放下时,可能会出现肌肉穿模等问题。A-pose 则能避免这种情况,其腋下、胯部等容易穿帮的区域自然展开,为后续的动画制作提供了更好的基础,减少了调整和修正的工作量。
3D空间的旋转
这块东西在Games105数学原理博客部分已总结
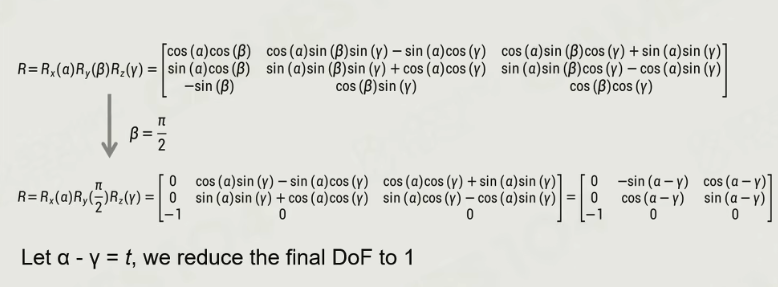
欧拉角
分别沿着三个轴旋转,旋转矩阵可以合并成一个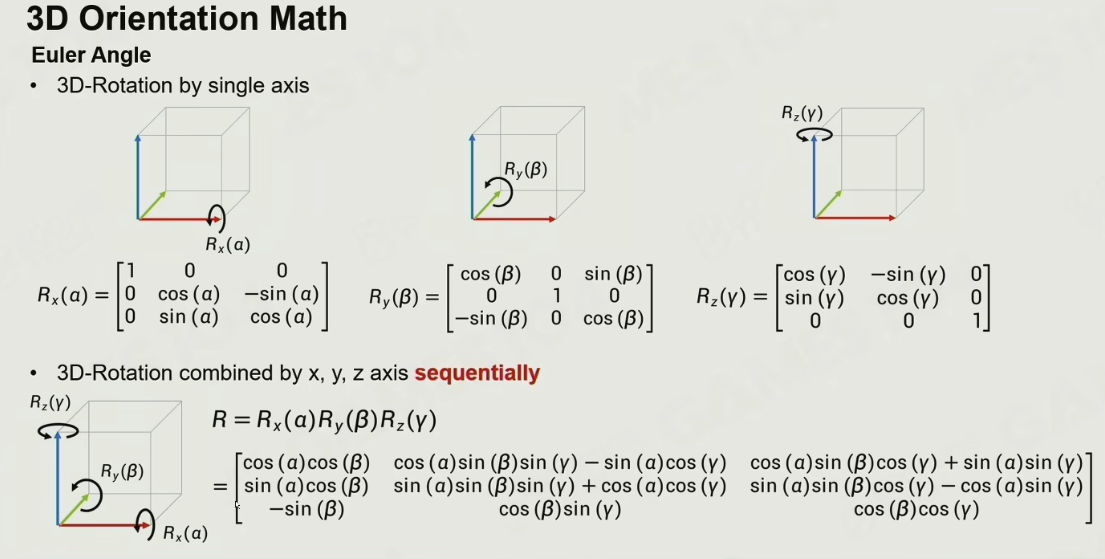
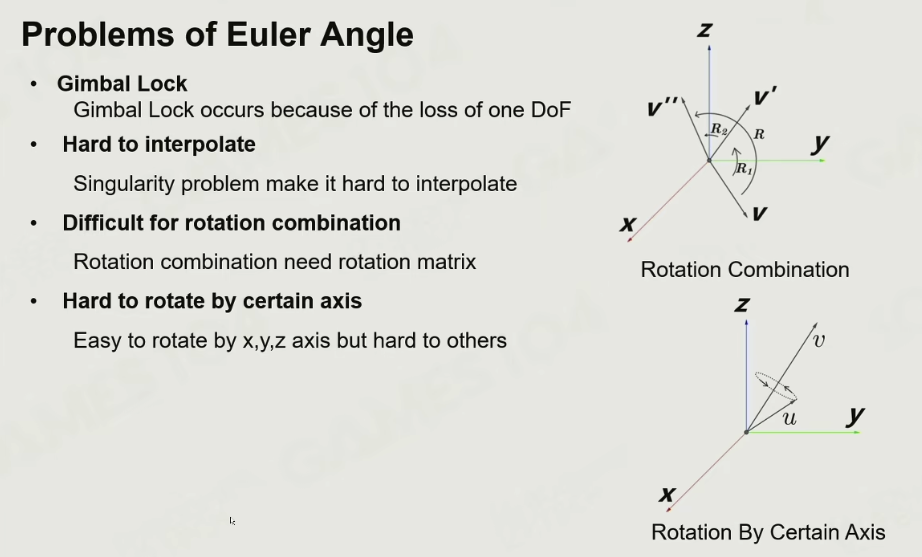
缺点:
- 顺序依赖
- 万向锁,直接用公式也能解释,把y轴旋转带入后,整个旋转公式只剩下x轴旋转部分了,z轴的都没了
欧拉角的插值有问题
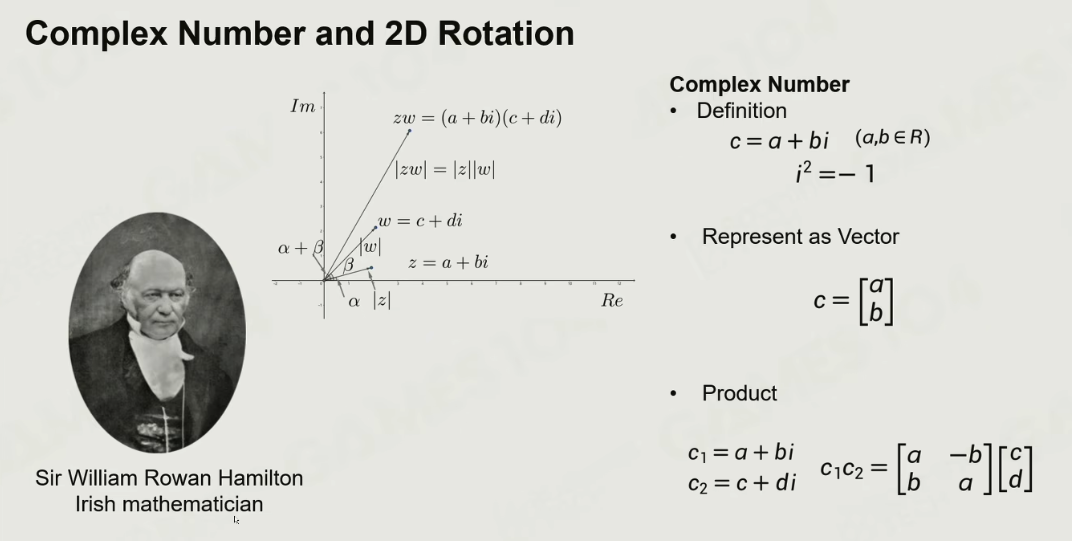
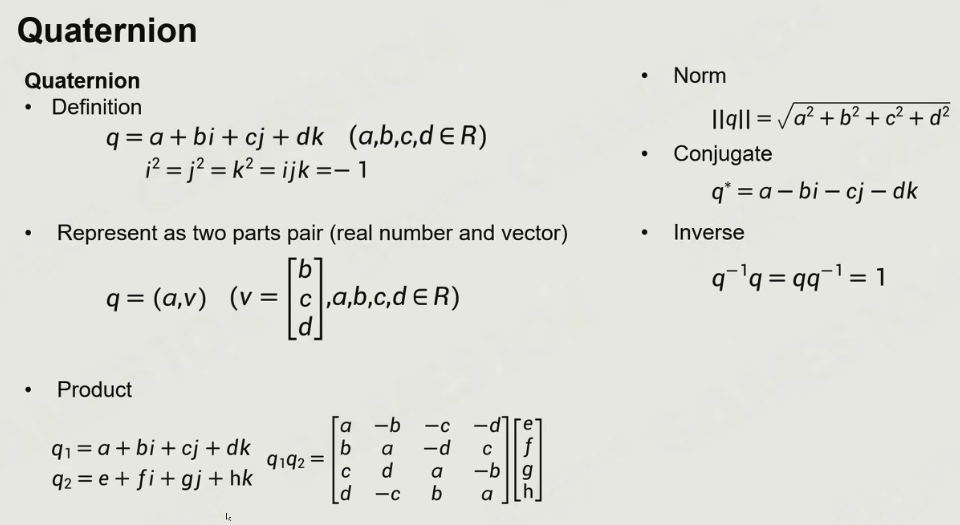
四元数
在二维平面上可以用复数代表旋转。另外旋转的叠加可以直接通过Product运算算出
拓展到3D旋转
欧拉角转四元数
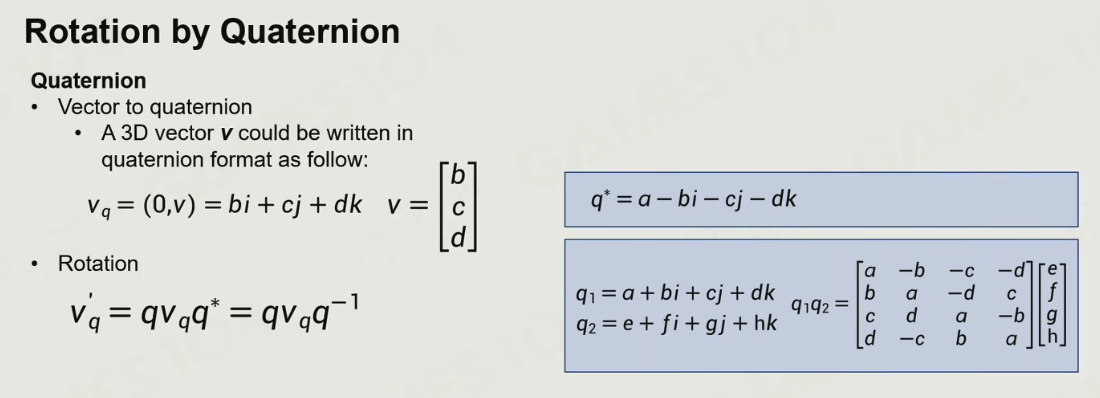
用四元数旋转一个顶点
总结后:直接表达成旋转矩阵如下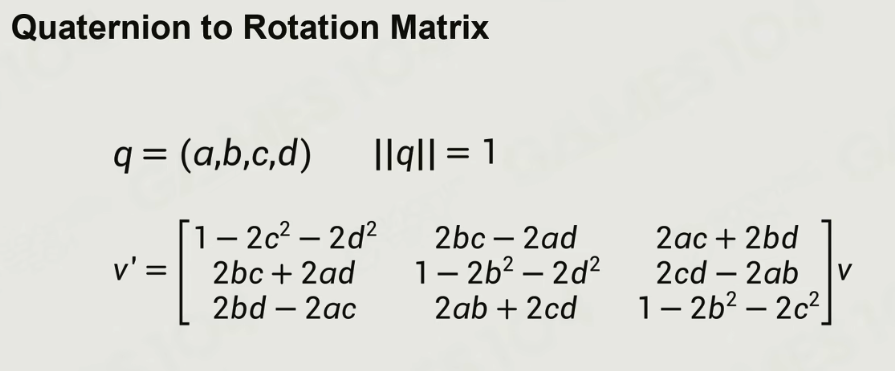
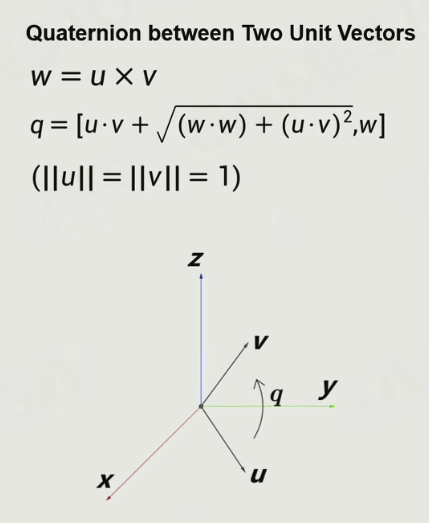
用四元数表达从U旋转到V
可以通过下面的公式计算出对应的旋转四元数是多少
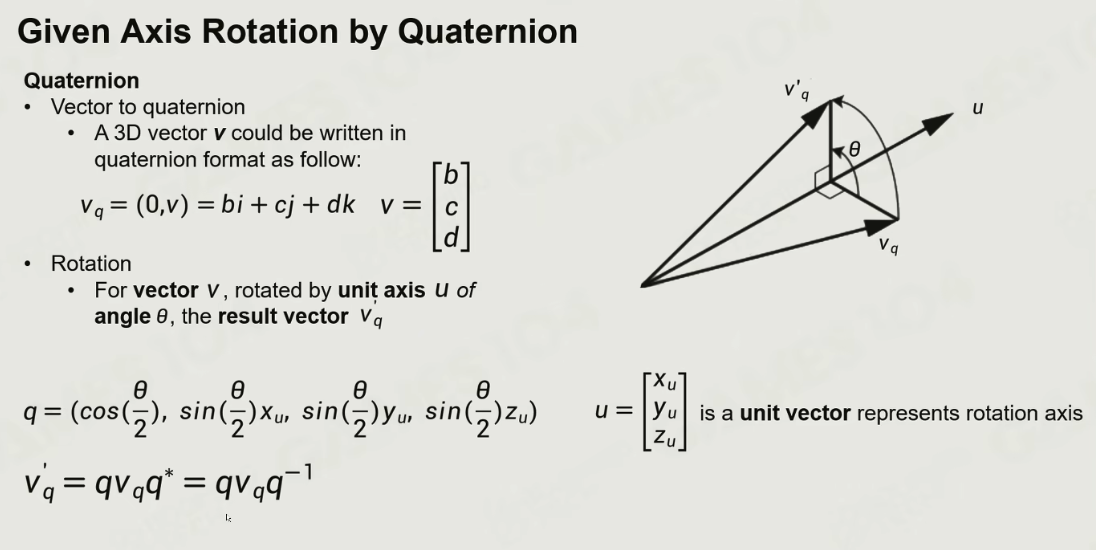
四元数表达给定轴的旋转
蒙皮动画
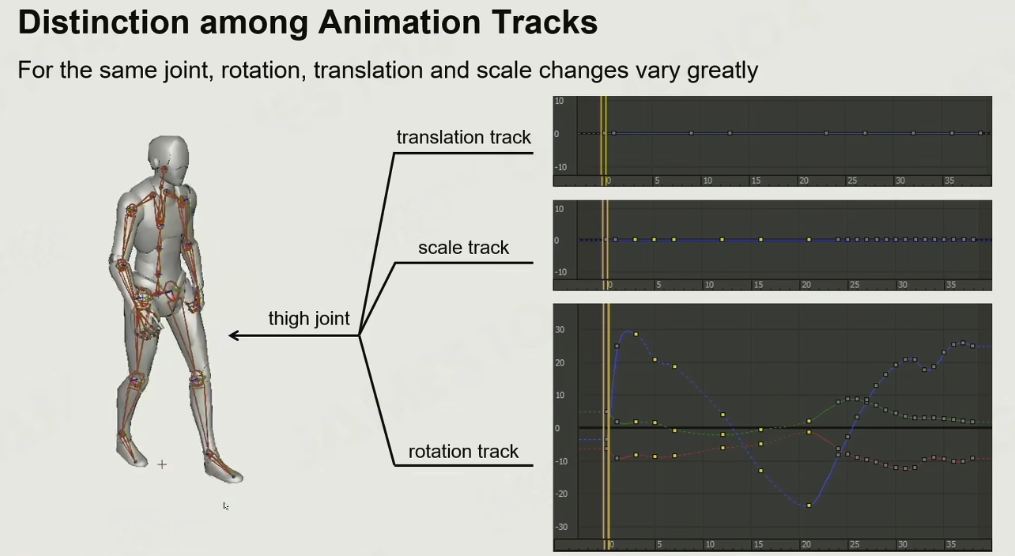
骨骼信息
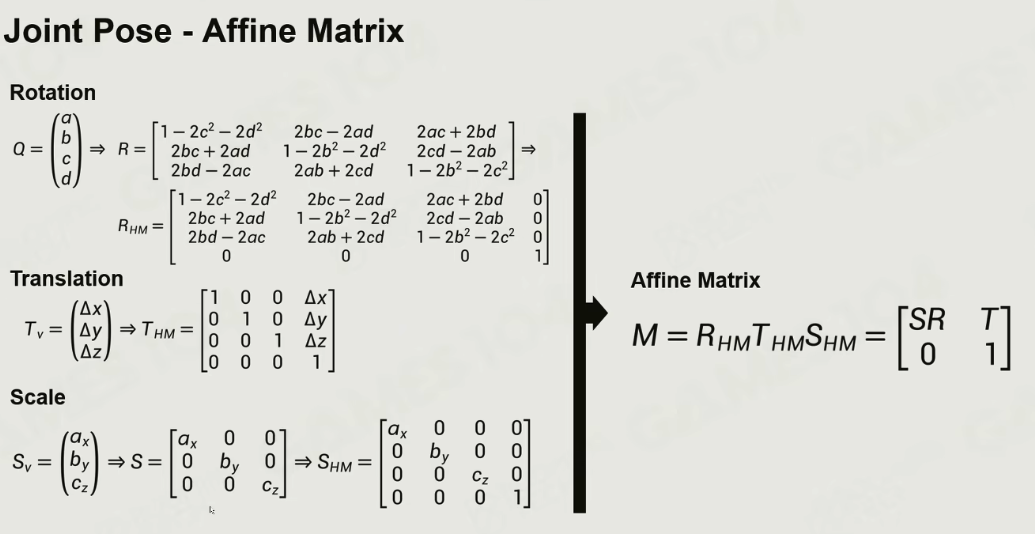
旋转,大部分都是以旋转为主
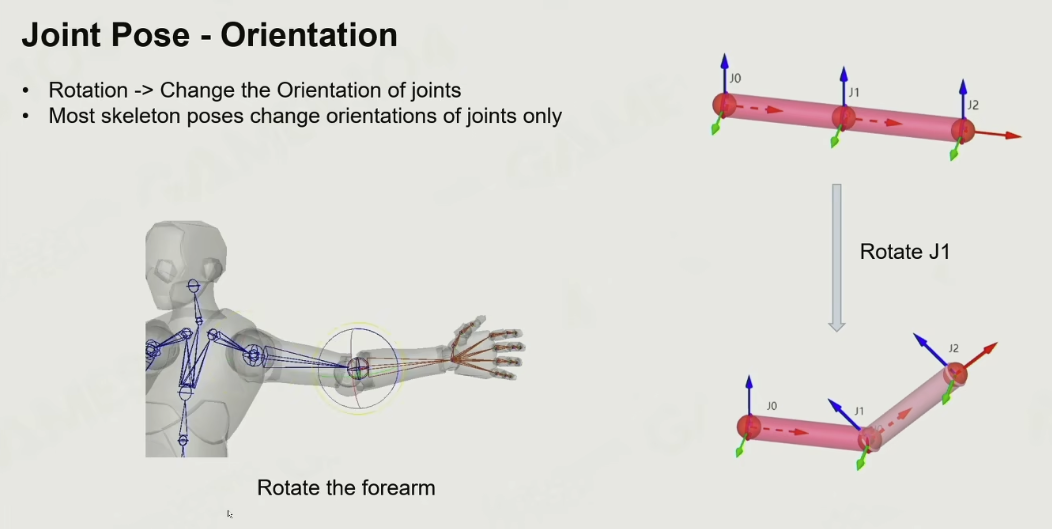
平移
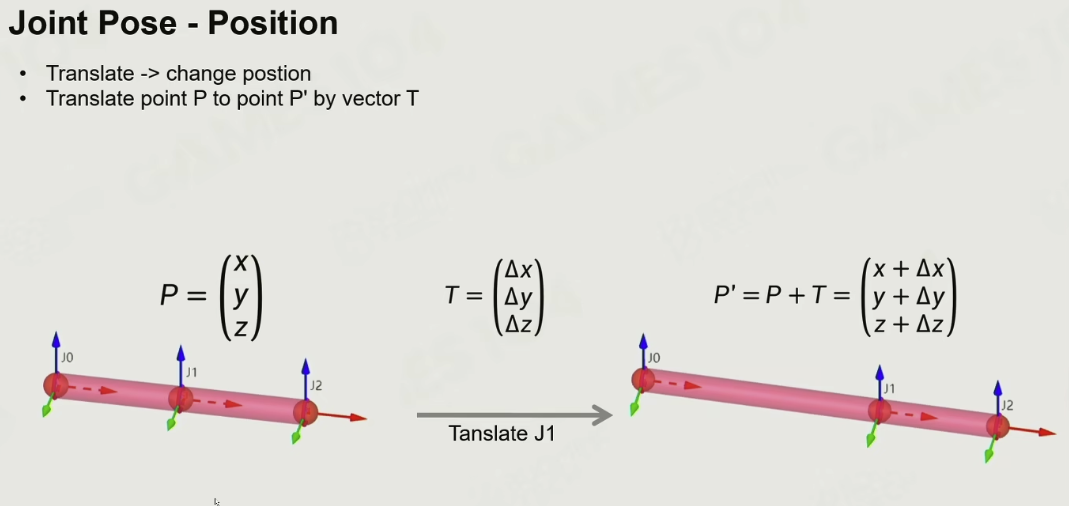
平移还是有用的,比如站立和蹲下是时Root和髋关节就发生了平移
放缩
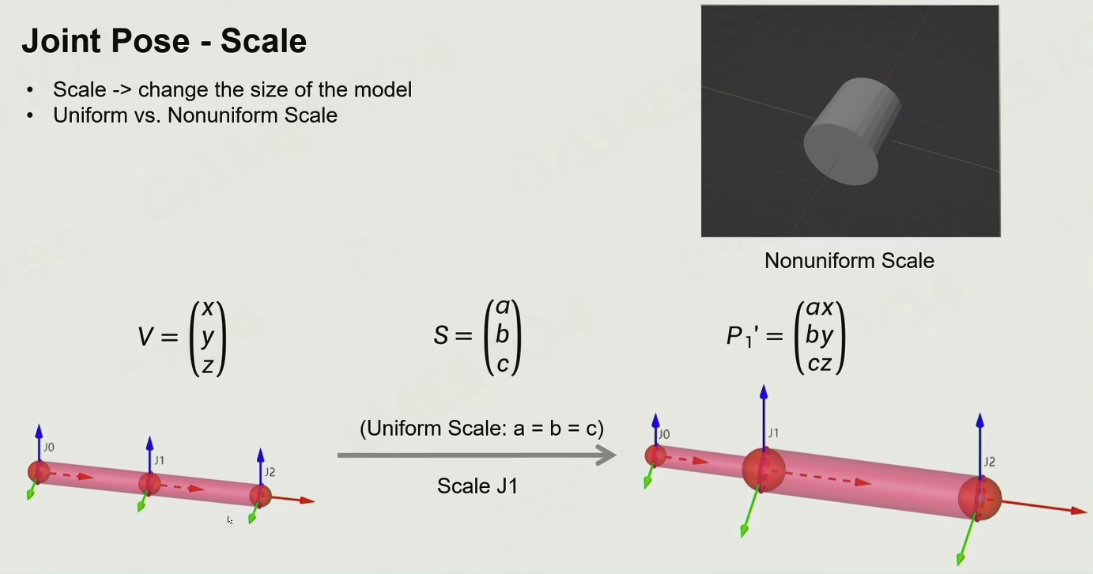
所以Joint Pose就是,其中旋转矩阵可以通过四元数转化而来(注意这个变换不需要透视除法)
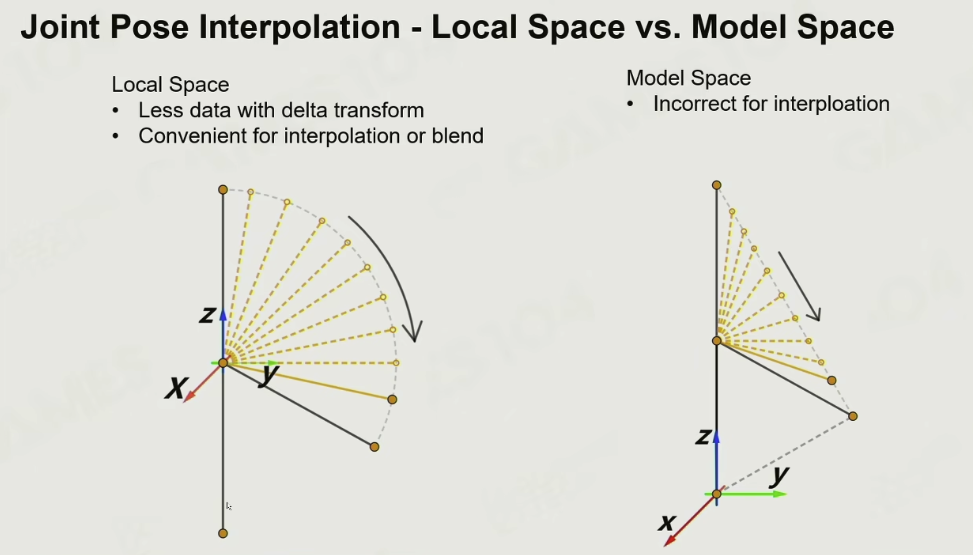
另外骨骼信息存储的都在局部坐标系,也就是说骨骼信息存储的实际是它相对于父骨骼的变换信息,而不是相对于整个模型。
如果使用局部坐标系:
- 只需更新父骨骼的变换,就能自动影响子骨骼。
- 方便做层级动画,比如抬手动作只需要改手臂局部变换,身体会自动跟随。
如果存储在模型坐标系:
- 每个骨骼的世界变换必须单独存储或重复计算。
- 当父骨骼旋转时,需要手动更新所有子骨骼的世界位置,计算复杂且容易出错。
动画混合(比如走路 + 挥手)通常对局部骨骼变换进行插值或加权,而不是对世界位置插值:
- 局部空间插值保持层次一致性,不会出现骨骼分离或错位。
- 世界空间插值容易导致骨骼错位或姿势破坏,因为子骨骼的位置依赖父骨骼。
蒙皮矩阵
现在已经理解了骨骼信息如何存储,下面介绍骨骼信息如何作用到顶点上
下图说明即使骨骼移动,顶点与骨骼的相对位置并不会变化
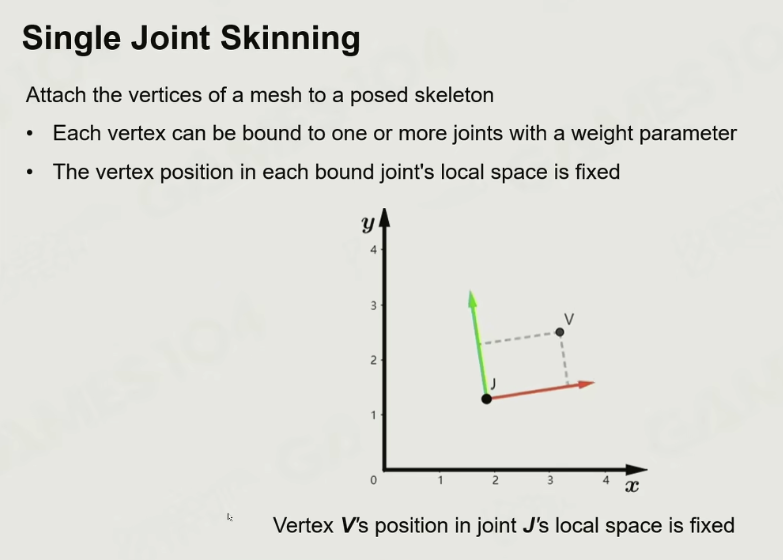
Bind Pose:默认姿态用于绑定骨骼和顶点
下面三个参数分别是某个顶点:
- 绑定姿态下的模型空间位置
- 绑定姿态下的局部空间位置
- 绑定姿态下的骨骼在模型空间的位置
顶点相对于骨骼的位置在任何时候都不会变,并且等于骨骼在模型空间位置的逆矩阵 x 顶点在模型空间中的位置
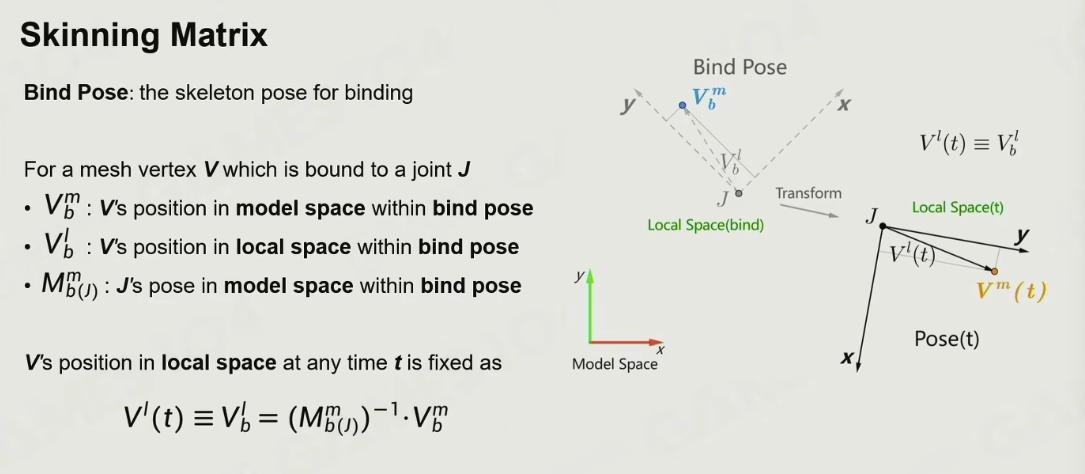
顶点的位置 = BindPose下顶点位置先转到骨骼的局部坐标系再跟着骨骼运动后的位置
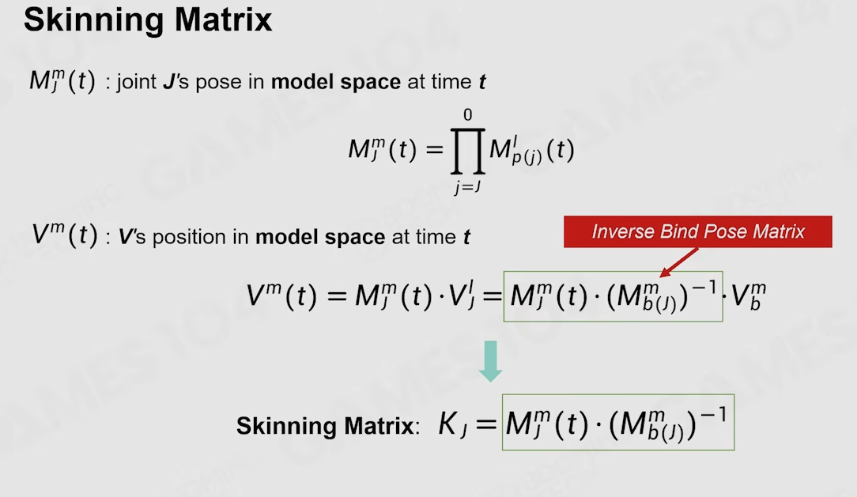
在存储骨骼信息时,需要存储Inverse BindPose Matrix,它是把变换矩阵一路从父节点传递下来,得到当前骨骼的模型坐标系下的变换信息,然后求逆。
Inverse BindPose Matrix的作用是把一个在模型坐标系下的顶点坐标(bindpose下的)转移到这根骨骼上,所以不管任何时候,转移后得到的结果都应该是一样的
把顶点信息(bindpose下)转移到骨骼后,再乘以现在的骨骼变换矩阵,就得到了顶点的现在的位置(实际位置),这样也就得到了一帧动画下这个顶点的位置
蒙皮变换
总结下:在骨骼蒙皮动画中,每个顶点在 Bind Pose(绑定姿态) 下的模型空间位置,通过 Skinning Matrix(即 $M_i \cdot B_i^{-1}$ 的加权和)进行变换后,就得到了该顶点在当前动画帧下的最终渲染位置。
$$ v_\text{final} = \sum_i w_i \, (M_i \cdot B_i^{-1}) \, v_\text{bind} $$- $v_\text{bind}$ —— 顶点在绑定姿态下的模型空间坐标
- $B_i^{-1}$ —— 骨骼绑定姿态的逆矩阵(Inverse Bind Pose)
- $M_i$ —— 当前帧骨骼的变换矩阵
- $w_i$ —— 顶点对骨骼的权重
另外再乘上Model变换矩阵,就转移到世界坐标系,所以传递给GPU的变换信息应该是下面这个整体的变换公式
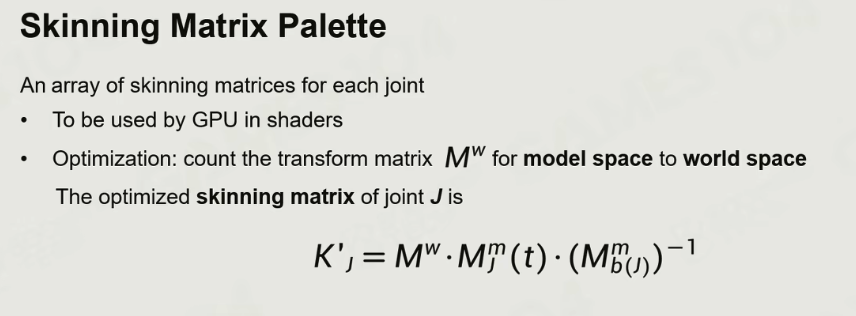
多个骨骼影响的加权平均应该放在模型坐标系
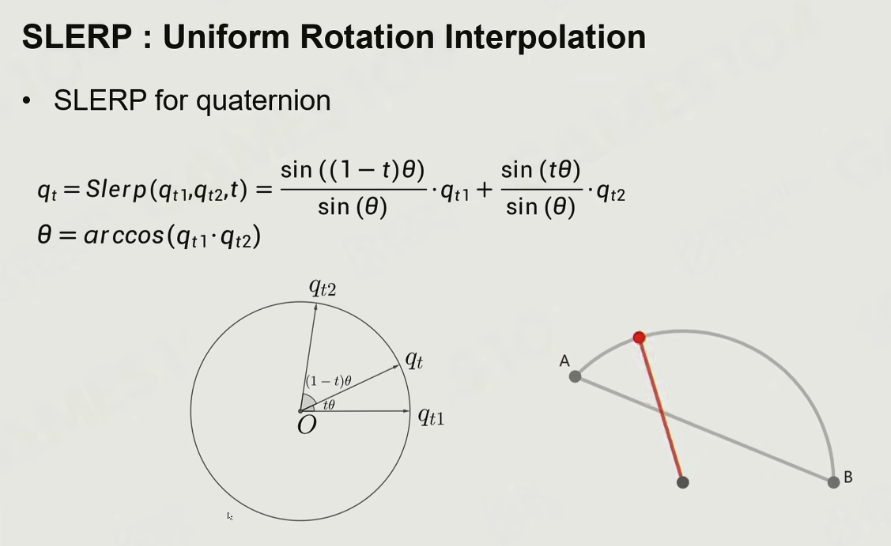
动画的插值
Games105(2)已经详细记录
四元数的NLearp插值的角速度不同
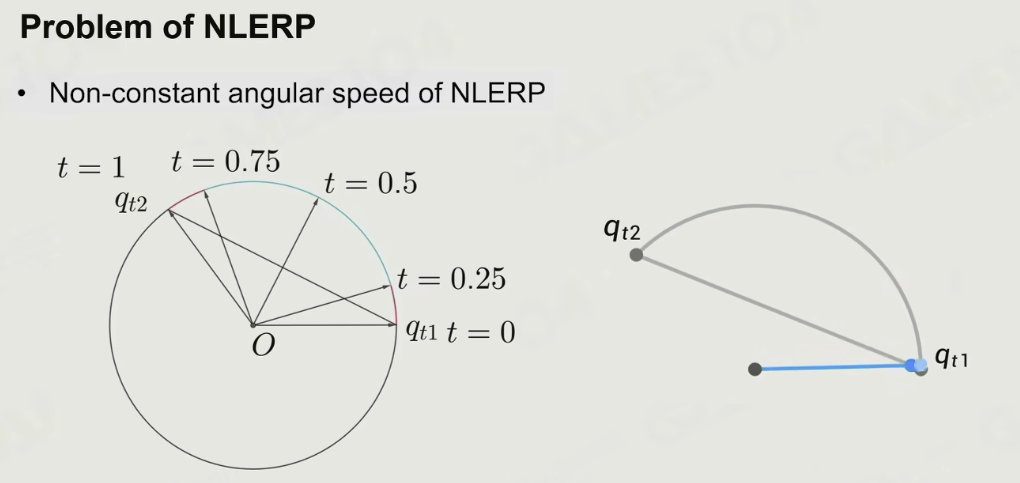
解决上述问题的办法
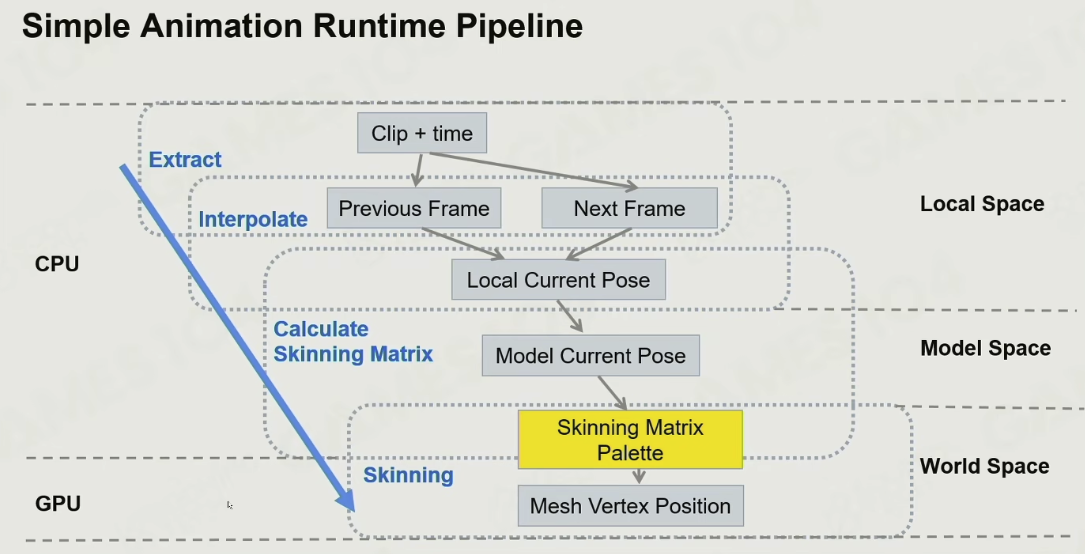
动画的Runtime Pipeline
- 计算运行时间
- 计算插值
- 计算骨骼信息
- 计算蒙皮矩阵
- 更新顶点信息
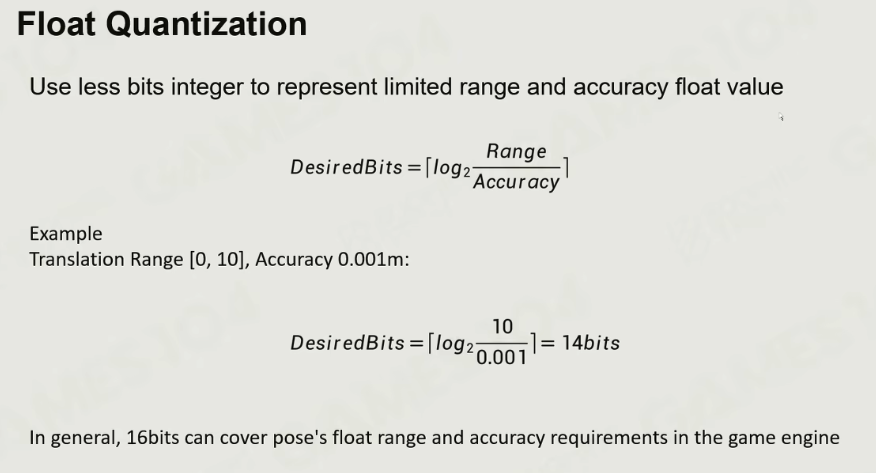
动画压缩
5S的动画数据要求2GB存储空间
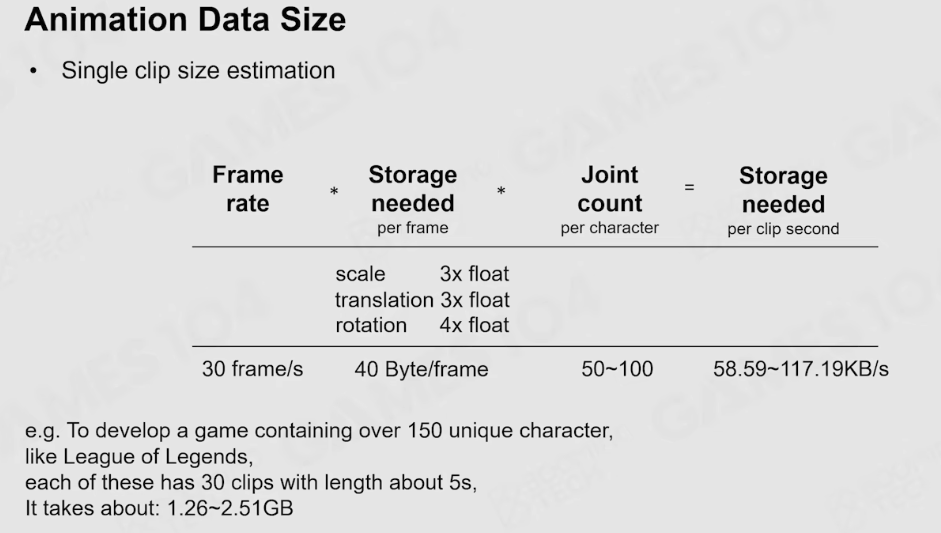
骨骼信息大量变化的都是旋转