作业介绍
首先看一下整体渲染流程
- 绘制光源
- 绘制shadowMap
- diffuse、depth、normal、shadow、worldPos五个GBuffer信息
- 最后利用上边的信息来真正进行渲染
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
|
// Draw light
light.meshRender.mesh.transform.translate = light.entity.lightPos;
light.meshRender.draw(this.camera, null, updatedParamters);
// Shadow pass
gl.bindFramebuffer(gl.FRAMEBUFFER, light.entity.fbo);
gl.clear(gl.COLOR_BUFFER_BIT | gl.DEPTH_BUFFER_BIT);
for (let i = 0; i < this.shadowMeshes.length; i++) {
this.shadowMeshes[i].draw(this.camera, light.entity.fbo, updatedParamters);
// this.shadowMeshes[i].draw(this.camera);
}
// return;
// Buffer pass
gl.bindFramebuffer(gl.FRAMEBUFFER, this.camera.fbo);
gl.clear(gl.COLOR_BUFFER_BIT | gl.DEPTH_BUFFER_BIT);
for (let i = 0; i < this.bufferMeshes.length; i++) {
this.bufferMeshes[i].draw(this.camera, this.camera.fbo, updatedParamters);
// this.bufferMeshes[i].draw(this.camera);
}
// return
// Camera pass
for (let i = 0; i < this.meshes.length; i++) {
this.meshes[i].draw(this.camera, null, updatedParamters);
}
|
直接光照
EvalDiffuse(wi, wo, uv)
通过入射方向、出射方向、漫反射率纹理图uv坐标来计算BRDF的返回值,因为是计算diffuse的BRDF,所以它是一个常数
 分母π保证了反射光的总能量不超过入射光能量
分母π保证了反射光的总能量不超过入射光能量
1
2
3
4
5
6
7
|
vec3 EvalDiffuse(vec3 wi, vec3 wo, vec2 uv) {
vec3 albedo = GetGBufferDiffuse(uv);
vec3 normal = GetGBufferNormalWorld(uv);
// 这里把cos项和BRDF项放在一起了
float cosTheta = max(0,dot(normal,wi));
return albedo * cosTheta * INV_PI;
}
|
这样就得到了渲染方程中的BRDF项
EvalDirectionalLight(vec2 uv)
这里需要计算一个着色点的直接光照项(需要通过shadowMap来考虑阴影)
1
2
3
4
|
vec3 EvalDirectionalLight(vec2 uv) {
vec3 Le = GetGBufferuShadow(uv) * uLightRadiance;
return Le;
}
|
其中GetGBufferuShadow方法返回的就是Visbility项,它在上一轮渲染中存储了每个像素的可见性信息
1
2
3
4
|
float GetGBufferuShadow(vec2 uv) {
float visibility = texture2D(uGShadow, uv).x;
return visibility;
}
|
最后修改main函数,它还做了伽马矫正
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
void main() {
float s = InitRand(gl_FragCoord.xy);
vec3 L = vec3(0.0);
vec3 color = vec3(0.0);
vec3 worldPos = vPosWorld.xyz;
vec2 screenUV = GetScreenCoordinate(vPosWorld.xyz);
vec3 wi = normalize(uLightDir);
vec3 wo = normalize(uCameraPos - worldPos);
// 直接光照
L = EvalDiffuse(wi, wo, screenUV) * EvalDirectionalLight(screenUV);
// gamma矫正
color = pow(clamp(L, vec3(0.0), vec3(1.0)), vec3(1.0 / 2.2));
gl_FragColor = vec4(vec3(color.rgb), 1.0);
}
|
我的电脑是mac,根据网上只有mac电脑会出下如下问题,根据视角移动会不断变换出错的位置
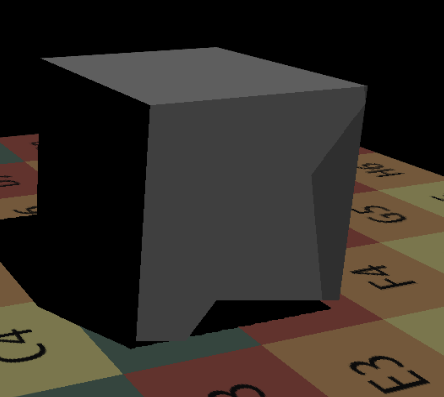 我们先把可见性设置为1,避免阴影生成,看看是什么情况
我们先把可见性设置为1,避免阴影生成,看看是什么情况
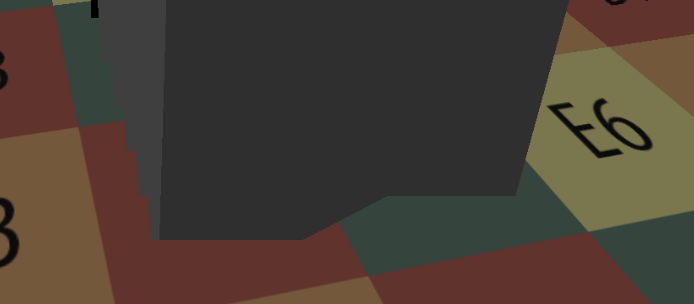 举个例子:假设地板深度值为0.5001,上方模型为0.5002。在16位深度缓冲区中,两者可能被四舍五入为相同值(如0.500),导致GPU随机选择显示其中一个67。此时地板可能因浮点舍入误差被误判为更小Z值,从而错误覆盖模型。
举个例子:假设地板深度值为0.5001,上方模型为0.5002。在16位深度缓冲区中,两者可能被四舍五入为相同值(如0.500),导致GPU随机选择显示其中一个67。此时地板可能因浮点舍入误差被误判为更小Z值,从而错误覆盖模型。
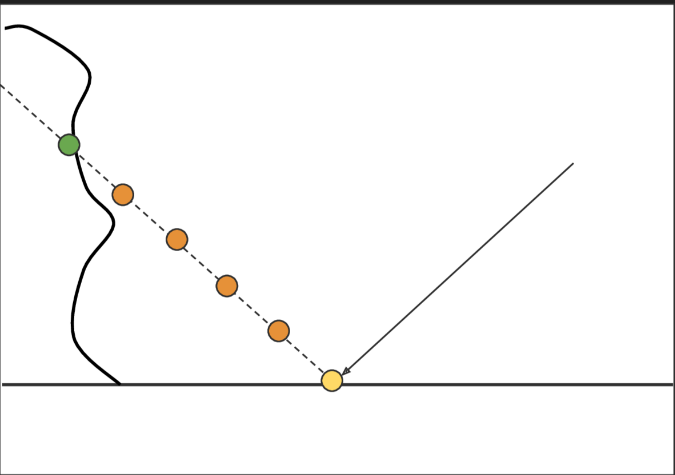
NDC坐标下的Z值并不是线性的,越靠近近平面的地方,精度越高,远的地方精度越低,参考下图
 所以说当我把摄像机离得特别近时,这种问题慢慢就得到了缓解,因为接近近平面精度比较高
所以说当我把摄像机离得特别近时,这种问题慢慢就得到了缓解,因为接近近平面精度比较高 所以说这种问题的一种解决思路就是调整远近平面的距离,越小,精度高的范围越大,出现z-fighting可能性越低
所以说这种问题的一种解决思路就是调整远近平面的距离,越小,精度高的范围越大,出现z-fighting可能性越低
1
2
3
|
// Add camera
// const camera = new THREE.PerspectiveCamera(75, gl.canvas.clientWidth / gl.canvas.clientHeight, 1e-3, 1000);
const camera = new THREE.PerspectiveCamera(75, gl.canvas.clientWidth / gl.canvas.clientHeight, 5e-2, 1e2);
|
 为了验证这一说法的正确性,我们拉远镜头,就看出来这种问题又出现了,说明远处z值精度小
为了验证这一说法的正确性,我们拉远镜头,就看出来这种问题又出现了,说明远处z值精度小
 不过这种解决方案只适合玩具,调整NF参数属于是把整个项目的东西都改了,还有一种解决思路就是在有这种重叠放置的地方进行手动偏移
不过这种解决方案只适合玩具,调整NF参数属于是把整个项目的东西都改了,还有一种解决思路就是在有这种重叠放置的地方进行手动偏移
间接光照
bool RayMarch(vec3 ori, vec3 dir, out vec3 hitPos)
这一步需要实现linear RayMarch,通过一条光线,求出击中点的坐标
 基本思路就是从着色点沿着光照方向每次向前一小步,查看这一点对应的深度值,并于深度缓冲中的深度值做比较,如果这一点深度值比深度缓冲中深度值大了,说明他已经处于可见物体的内部
基本思路就是从着色点沿着光照方向每次向前一小步,查看这一点对应的深度值,并于深度缓冲中的深度值做比较,如果这一点深度值比深度缓冲中深度值大了,说明他已经处于可见物体的内部
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
bool RayMarch(vec3 ori, vec3 dir, out vec3 hitPos) {
const int totalStepTimes = 60;
const float threshold = 0.0001;
float step = 0.05;
vec3 stepDir = normalize(dir) * step;
vec3 curPos = ori;
for(int i = 0; i < totalStepTimes; i++) {
vec2 screenUV = GetScreenCoordinate(curPos);
float rayDepth = GetDepth(curPos);
float gBufferDepth = GetGBufferDepth(screenUV);
// 已经在可见物体内部
if(rayDepth > gBufferDepth + threshold){
hitPos = curPos;
return true;
}
curPos += stepDir;
}
}
|
现在已经有方法对光线求交了,下面就来实现间接光照
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
void main() {
float s = InitRand(gl_FragCoord.xy);
vec3 worldPos = vPosWorld.xyz;
vec2 screenUV = GetScreenCoordinate(vPosWorld.xyz);
vec3 wi = normalize(uLightDir);
vec3 wo = normalize(uCameraPos - worldPos);
vec3 normal = GetGBufferNormalWorld(screenUV);
// 着色点的直接光照
vec3 L = vec3(0.0);
L = EvalDiffuse(wi, wo, screenUV) * EvalDirectionalLight(screenUV);
// 着色点的间接光照
vec3 L_ind = vec3(0.0);
for(int i = 0; i < SAMPLE_NUM; i++){
float pdf;
vec3 localDir = SampleHemisphereCos(s, pdf);
vec3 b1, b2;
// 通过空间法线得到两个切线,从而建立切线空间坐标系
LocalBasis(normal, b1, b2);
// 通过BTN矩阵将局部坐标系转为世界坐标系
vec3 dir = normalize(mat3(b1, b2, normal) * localDir);
vec3 hit_pos = vec3(0.0);
// 向采样方向发出光线
if(RayMarch(worldPos, dir, hit_pos)){
vec2 hitScreenUV = GetScreenCoordinate(hit_pos);
// 通过蒙特卡洛积分来近似渲染方程的积分值
L_ind += EvalDiffuse(dir, wo, screenUV) / pdf * EvalDiffuse(wi, dir, hitScreenUV) * EvalDirectionalLight(hitScreenUV);
}
}
L_ind /= float(SAMPLE_NUM);
L = L + L_ind;
vec3 color = pow(clamp(L, vec3(0.0), vec3(1.0)), vec3(1.0 / 2.2));
gl_FragColor = vec4(vec3(color.rgb), 1.0);
}
|
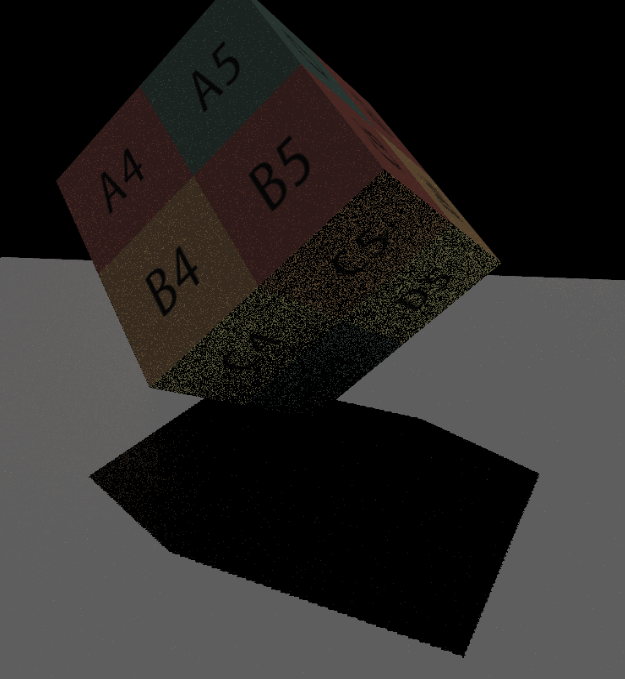
方块场景
洞穴场景渲染
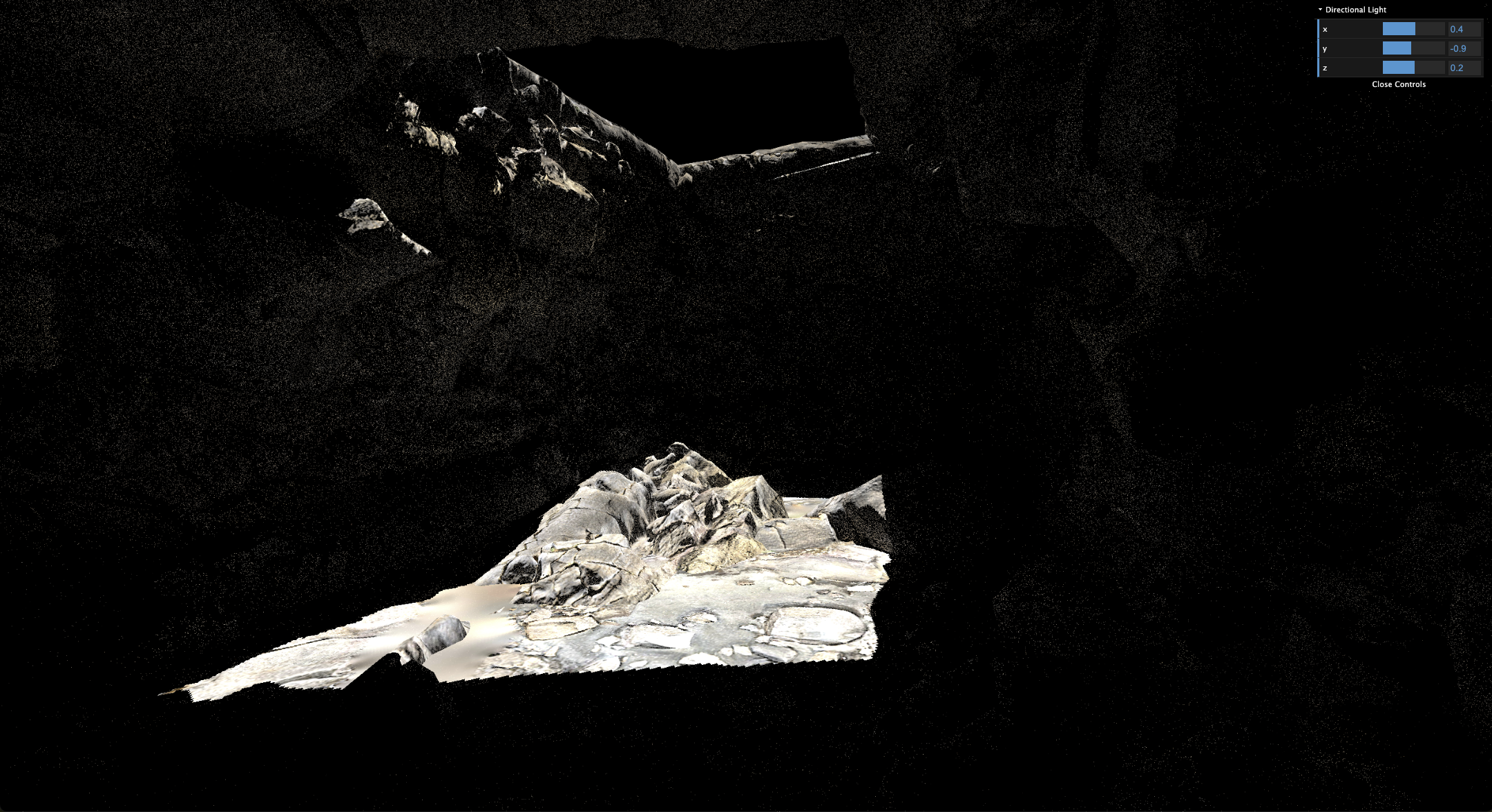 只渲染间接光
只渲染间接光
 所以SSR我理解也是在做光线追踪,但只利用了屏幕空间的信息,也就是真正被渲染的位置的信息,被覆盖掉的着色点是不会考虑的,这当然要比直接做光线追踪快很多。课程后边有实时光线渲染,目前还不知道如何实现的。
所以SSR我理解也是在做光线追踪,但只利用了屏幕空间的信息,也就是真正被渲染的位置的信息,被覆盖掉的着色点是不会考虑的,这当然要比直接做光线追踪快很多。课程后边有实时光线渲染,目前还不知道如何实现的。
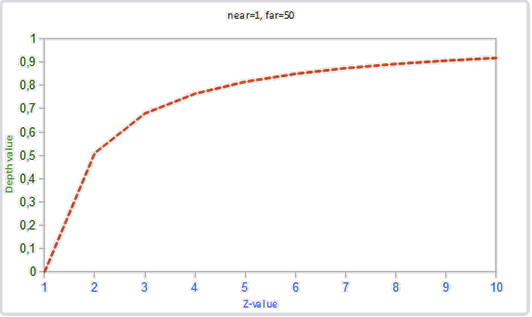
目前从方块场景能看出一些问题
按照目前的一次弹射渲染逻辑,理论上阴影的颜色就应该是黑色(因为即使有击中点,这一点计算出来的直接光照也必然是黑色),而现在有点漏光了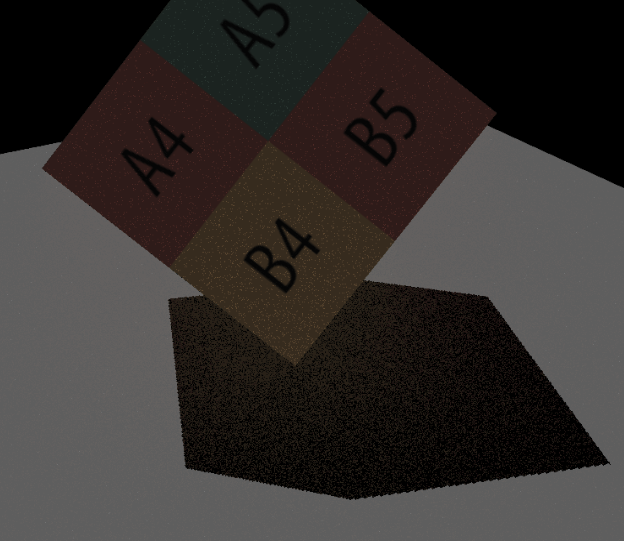 说明它判断击中点时,判断了B4位置的颜色,而实际上,它直接穿过了模型,打到了模型的正面,说明步长太大了。参考其他博客的解决思路
说明它判断击中点时,判断了B4位置的颜色,而实际上,它直接穿过了模型,打到了模型的正面,说明步长太大了。参考其他博客的解决思路
https://zhuanlan.zhihu.com/p/668194020
代码的思路跟前面的差不多,每一次步进时,判断下一步位置的深度与gBuffer的深度的关系,如果下一步的位置在gBuffer的前面(nextDepth<gDepth),则可以步进。如果下一步的深度没有gBuffer的深,就判断一下深度相差多少,有没有给定的阈值大。如果比阈值大,那么就直接返回 false ,否则,这个时候就可以执行SSR了。先让当前位置步进一个step,返回给 hitPos ,然后返回真。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
|
bool RayMarch(vec3 ori, vec3 dir, out vec3 hitPos) {
const float EPS = 1e-2;
const int totalStepTimes = 20;
const float threshold = 0.1;
bool result = false, firstIn = false;
float step = 0.8;
vec3 curPos = ori;
vec3 nextPos;
for(int i = 0; i < totalStepTimes; i++) {
nextPos = curPos+dir*step;
vec2 uvScreen = GetScreenCoordinate(curPos);
if(any(bvec4(lessThan(uvScreen, vec2(0.0)), greaterThan(uvScreen, vec2(1.0))))) break;
if(GetDepth(nextPos) < GetGBufferDepth(GetScreenCoordinate(nextPos))){
curPos += dir * step;
if(firstIn) step *= 0.5;
continue;
}
firstIn = true;
if(step < EPS){
float s1 = GetGBufferDepth(GetScreenCoordinate(curPos)) - GetDepth(curPos) + EPS;
float s2 = GetDepth(nextPos) - GetGBufferDepth(GetScreenCoordinate(nextPos)) + EPS;
if(s1 < threshold && s2 < threshold){
hitPos = curPos + 2.0 * dir * step * s1 / (s1 + s2);
result = true;
}
break;
}
if(firstIn) step *= 0.5;
}
return result;
}
|
使用大佬的优化算法,帧数一下就起来了
下面再介绍一下光线求交的加速方法,就是为深度图设置MipMap,上一层存入下一层4个像素的最小深度,也就是离屏幕更近的距离,如果一条光线在上一层中比最小距离更近,那它肯定不会在下一层中相交于物体,这样就可以省去很多if
具体的代码需要涉及到OpenGL如何生成这样的纹理,或者可能根本不支持这种mipmap,毕竟默认的mipmap并不是存最小值,而是平均值,可能需要自己写入缓存然后保存FBO,然后把它当作一张纹理来使用。我就不写了,目前阶段以学习理论为主